
日本京都工藝纖維大學等組成的研究團隊通過實驗發現,行人在人行橫道等場所行走時之所以不會相互碰撞,是因為通過時間預判建立了整體的秩序。如果有部分行人分心,便會影響整體。該成果對進行集體決策、瞭解動物群體性以及避免機器人和無人航空載具碰撞等都有幫助。
在人行橫道或步行道等場所,行人可以在沒有任何人引導的情況下自然行走而不會彼此碰撞。這與魚群或鳥群相同,是整個群體自發形成有序結構的「自組織現象」。對向行人之間形成互不干擾的佇列通行的「渠化現象」就是其中一個例子。
以前一直是用數學模式來解釋這種機制,即人根據與某個時間點遇到對象之間的距離來避免碰撞。但近年來,隨著人群運動影像分析技術的提高,出現了這種數學模式無法解釋的現象。雖然個人會預判對方的位置,但對整個人群的影響一直沒有獲得實驗驗證。

行人對行實驗(圖片由京都工藝纖維大學提供)
對此,京都工藝纖維大學的研究團隊先假設「預判會促進人群的自組織」,並對此進行了實驗。實驗時讓各有27個人的兩組人群相向而行,讓其中一組的3個人一邊用智慧型手機計算數學題一邊行走,分散其對周邊的注意力。
結果發現,與沒有人計算數學題時相比,有人計算時不僅是本人,整個群組的行走速度都會降低,渠化速度也比較慢。這表明,即便只是部分打亂預判,也會影響整個群體的自組織。
另外,計算數學題的人還會闖入對面走來的人群等,並在發生碰撞前突然大幅改變方向。不僅是本人,無法預判其動作的對向行人以及同向行走的人也會突然大幅改變方向。無人邊走邊計算數學題時則沒有發生這種現象。
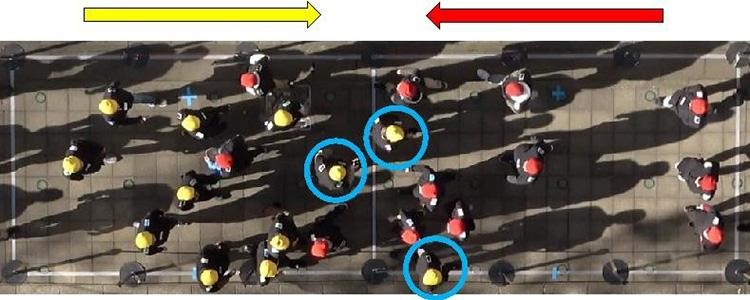
實驗場景的俯視圖。藍圈標出的人在用手機計算數學題(圖片由京都工藝纖維大學提供)
通過以上結果可以確認,如果有部分行人注意力不集中,那麼不僅是本人,還會影響周圍人的預判。預判需要雙向進行,避免碰撞必須雙方協作完成,相互之間的預判會影響整個群體的秩序。
研究團隊通過該成果證明了人類等在群體中相互預判的重要性。這為人類的集體決策以及動物和機器人群體等各種自組織的研究帶來了新的角度。還有望用來預防擁堵和踩踏事故,規畫活動和疏散路線等。
京都工藝纖維大學資訊工學與人類科學系認知科學專業的助教村上久介紹說:「今後還打算研究視線與動作等帶來的影響。通過反復進行驗證,可以構建根據預判處理群體行動的最適化數學模式。或許還有助於避免機器人和無人航空載具的碰撞等。」
此次的研究團隊由日本的京都工藝纖維大學、長岡技術科學大學和東京大學的研究人員組成。相關成果已於3月18日發布在美國科學期刊《Science Advances》上。該研究得到了日本學術振興會科學研究費助成事業、科學技術振興機構(JST)未來社會創造事業和文部科學省卓越研究員事業的援助。
論文資訊
論文:Mutual anticipation can contribute to self-organization in human crowds
雜誌:Science Advances
DOI:10.1126/sciadv.abe7758
日文:JST Science Portal 編輯部
中文:JST客觀日本編輯部











