
無需手握方向盤和腳踏製動器,利用聲音和視線就能自由操控的自動駕駛汽車問世了。
名古屋大學未來社會創造機構的武田一哉教授等人推進的產學合作項目開發出了兼具高級駕駛技術和人機交流能力的自動駕駛系統,為實現人與智慧機器和諧共生的社會,項目成員正在向構築平台發起挑戰。

武田一哉 名古屋大學未來社會創造機構 教授
2009~2015年 CREST研究代表。
2016年開始擔任「人機協作技術聯盟」(OPERA)的領域總負責人。
用深度理解人類的技術,實現智慧機器與人協作的社會
利用自動駕駛汽車享受駕車樂趣的未來社會就在眼前。識別行人和道路標識等週遭環境的攝像頭和雷達、準確掌握自車位置的全球定位系統(GPS)和立體地圖等以實現全自動駕駛為目標的技術,其精度正在飛躍性提高。
不過,能夠讓普通用戶輕鬆操作自動駕駛汽車的人機介面卻沒有被充分研究。名古屋大學未來社會創造機構的武田一哉教授強調說:「要想讓自動駕駛汽車真正滲透到人類社會,人與自動駕駛汽車之間的交流非常重要」。
自動駕駛汽車按照人的指示,沿著設定好的路線駛向目的地。但在此過程中,人與車沒有交流。人與車處於彼此被分割的狀態。武田教授表示:「就像計程車司機通過語言和手勢與乘客交流那樣,我們想製造出一臺能夠理解人類的心情和行為的自動駕駛汽車」。
這個想法並不僅限於自動駕駛汽車。通過配備人工智慧(AI)和感測器,機器變得越來越聰明,人類通過勞動獲得的報酬和幸福的内涵也在不斷變化。智慧機器被期待彌補少子老齡化導致的勞動力不足,同時也讓人類產生工作機會被智慧機器奪走的危機感,有時甚至會被認為智慧機器與人類處於對立關係。
開創人類與智慧機器和諧共生的新關係,正是武田教授擔任領域總負責人的「人機協作技術聯盟:Human machine harmonization system consortium(HMHS CONSORTIUM)」(OPERA基金項目*)的目標。所謂「協作」包含著讓智慧機器加深對人類的理解並提供合適的支援,與人類協作之意。武田希望「開發出一種能夠讓智慧機器與人類交流溝通的技術,實現人與機器相互協調、共同勞動的社會」。
* OPERA全稱為「產學共創平台共同研究推進項目」,是科學技術振興機構(JST)的科研基金項目。在此項目獲得基金資助的聯盟(consortium),將有為期5年,每年最大1000萬元的研究經費補助。
目標是開發Harmoware,集結了6家研究機構和29家企業
這個由名古屋大學作為主管單位的「人機協作技術聯盟」希望能開發出一款讓智慧機器與人類協作的基礎軟體「Harmoware」(圖1)。
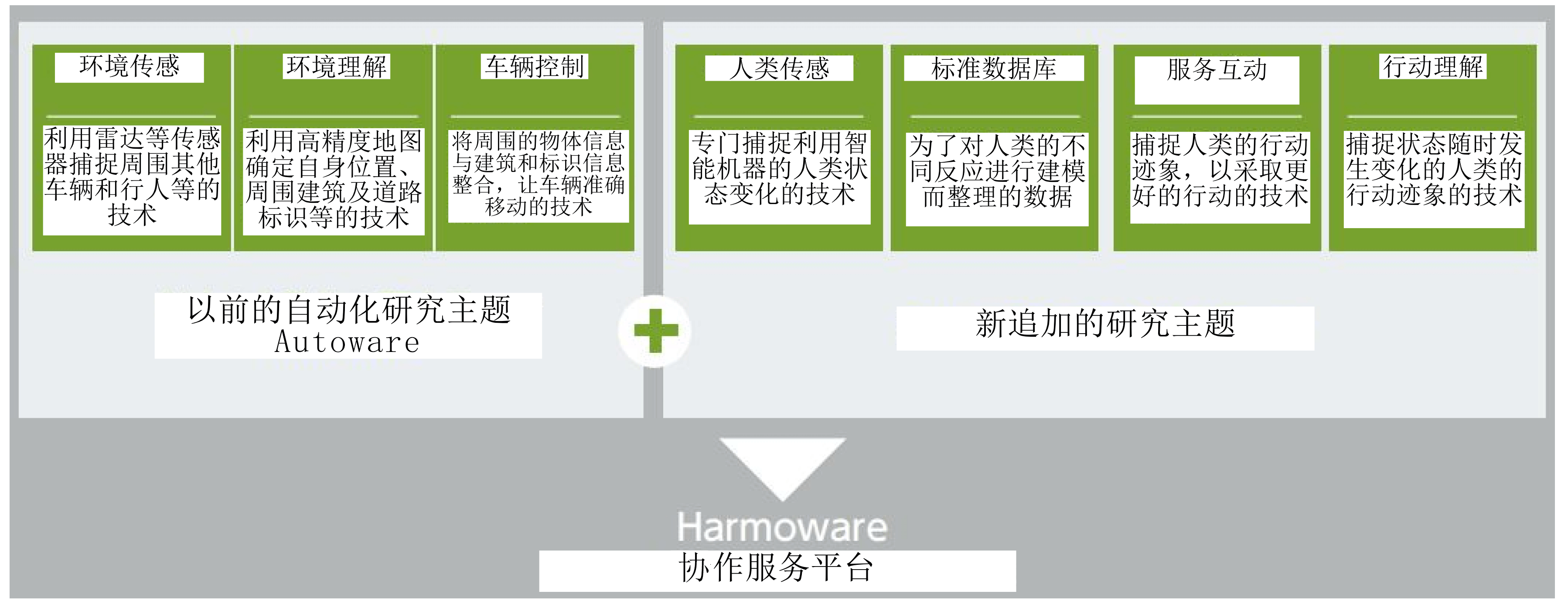
圖1:OPERA將在以往的 「環境感測」、「環境理解」、「車輛控制」等自動化研究課題的基礎上,增加「人類感測」(早稻田大學)、「標準數據庫」(名古屋大學)、「服務互動」(名古屋大學、產業技術綜合研究所)以及「行動理解」(名古屋大學、九州工業大學)等開發領域,構築新的協作服務平台。Harmoware安全方面的研究由東京工業大學承擔。
Harmoware的起始點是自動駕駛的基礎軟體「Autoware」。該軟體是由武田教授領導的CREST研發小組成員、當時的名古屋大學資訊科學研究生院的加藤真平副教授為核心開發出來的。隻需將該軟體安裝到車載專用計算機上即可實現自動駕駛。Autoware配備了根據高精度立體地圖識別週遭環境和自車位置、規畫準確的行車路線以及按照交通規則進行的駕駛控制等功能。武田介紹說:「在Autoware的自動化功能的基礎上,追加了理解人類的功能後,形成的就是Harmoware」。通過開發能夠捕捉人順應環境而做出的種種變化的技術、構築評測人狀態時需要參考的數據庫,使Harmoware發展成為能夠活用智慧機器的服務平台。
人機協作技術聯盟的成員除了早稻田大學、東京工業大學、產業技術綜合研究所、德島大學及九州工業大學外,還包括大學多領域初創企業在内的29家企業。聯盟成員將在共享專業知識及擅長技術的開放式創新體制下,開發可在Harmoware上運行的應用程序,也就是開發研製讓智慧機器理解人類的產品及服務。
武田表示「雖然開發的各類應用的性能指數屬於各企業的機密,但通過應用獲得的數據以及與Harmoware連接的技術則需要公開給聯盟成員。凡是加入聯盟的大學和企業都可以利用這些技術,以更低的成本開發新的產品和服務」。另外聯盟還提供試製與評測的共用實驗設施,支援聯盟成員在短時間内開發新產品。
為促進創新,聯盟還將積極活用和培養在讀博士生。OPERA有效地推進了按照文部科學省和經濟產業省制定的「強化產學官合作研究指南」進行的大學改革。名古屋大學建立了可以僱傭大學在讀博士生作為全勤研究員的制度——如果學生的研究題目與企業的合作研究内容一致的話,過去被看作是學業研究的部分也可以支付酬勞,這可以說是一項具有開創意義的制度。
武田表示:「以前認為學生的本分就是學習,在與企業的合作研究中,學生只是被定位為實驗的輔助者」。而在大學與產業界共同培養人才的新制度當中,學生直接參與產學合作項目,甚至還有可能激發學生創辦企業的意願。武田說:「我從心底裏相信,OPERA能夠擴大基礎研究和人才培養的產學合作,是一個加速推進開放式創新的優秀系統」。
理想是像坐計程車一樣,可以同自動駕駛汽車對話
Harmoware的代表性成果為多模態界面自動駕駛汽車(圖2)。多模態是指有多種輸入方式(模態)。2018年10月,名古屋大學與德島大學和愛信精機發布了能通過聲音、視線和手勢操作的自動駕駛汽車,並在名古屋大學校内進行自動駕駛的公開驗證實驗(圖3)。

圖2:配備多模態界面自動駕駛系統的車輛。自動駕駛汽車利用攝像頭和各種感測器獲取行人及道路標識等週遭環境資訊,並與高精度立體地圖相對照確定自車位置進行全自動駕駛。車頂安裝的是雷達裝置,通過發射紅外線測量與周圍物體之間的距離及物體的形狀。
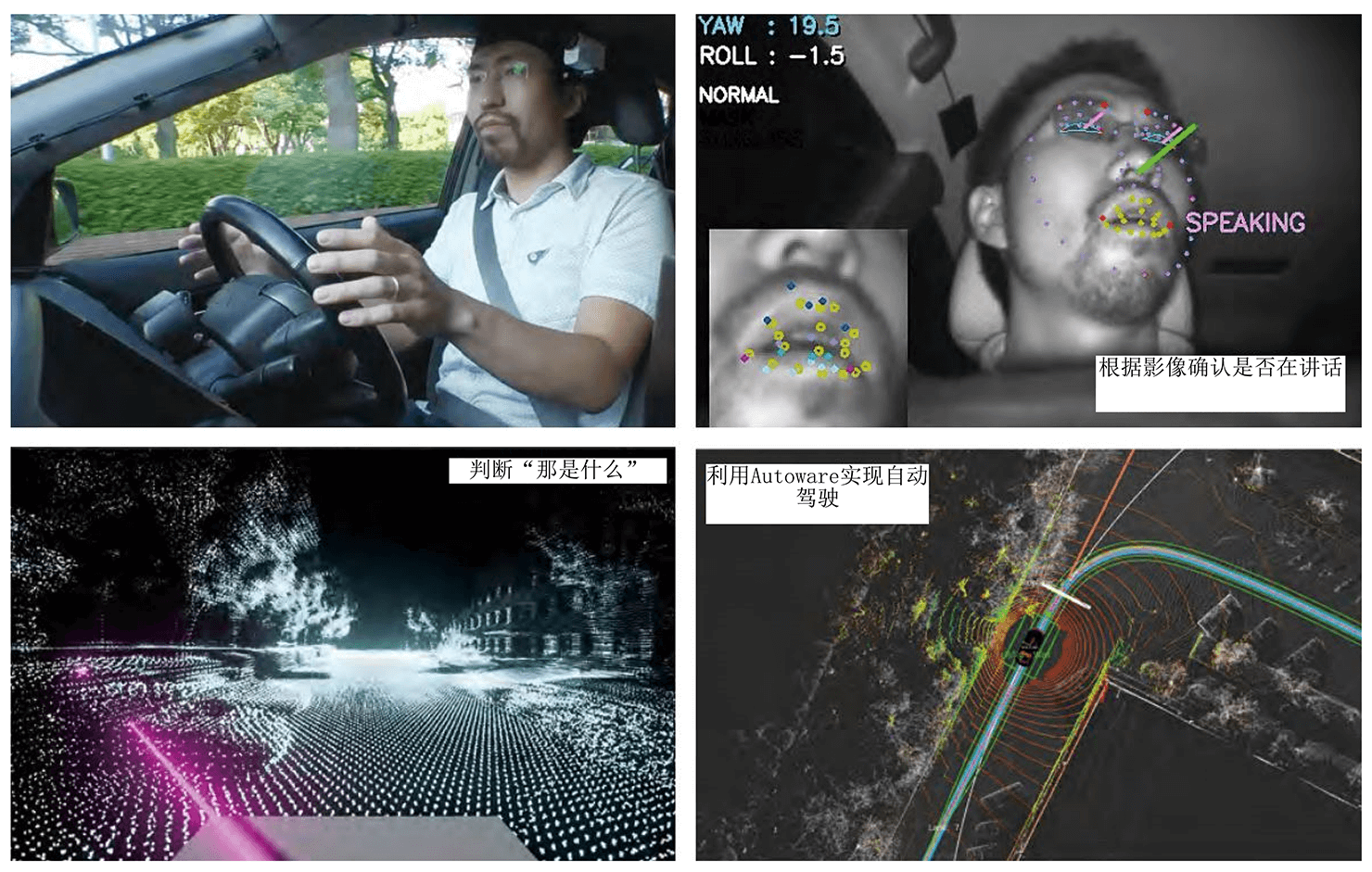
圖3:座位上安裝了攝像頭和麥克風,通過影像識別車内人員是否在講話(左上)。開發了除講話聲音外,還會檢測脣部動作和視線方向等,結合多種輸入方式高精度識別艙面部門甲級船員意圖的技術。各種顏色的點是用來識別面部各部分的參照點,黃色對應嘴部,淡藍色對應眼部(右上)。針對「那是什麼?」的指示語等,會根據視線的方向(粉色線)和地圖資訊判斷具體的位置(左下)。車輛根據感測器收集的資訊,利用Autoware進行自動駕駛(右下)。
自動駕駛汽車的座位上安裝了攝像頭和麥克風,輸入方式為聲音時,利用話音辨識功能處理;輸入方式為手勢時,利用深度感測器處理;輸入方式為視線時利用影像處理(圖4)等不同的技術。人進入汽車後,車輛會主動詢問:「是否仍像每天一樣前往National Innovation Complex?」。人搖頭的話,車輛會識別為需要變更目的地。「今天去‘野依紀念館’」,「好的。是要去‘野依紀念學術交流館’,對吧」——即便人使用簡稱或俗稱,車輛也能推測出目的地。向車輛發出「右轉」、「減速」等指示的話,車輛會按照指示改變方向和速度。
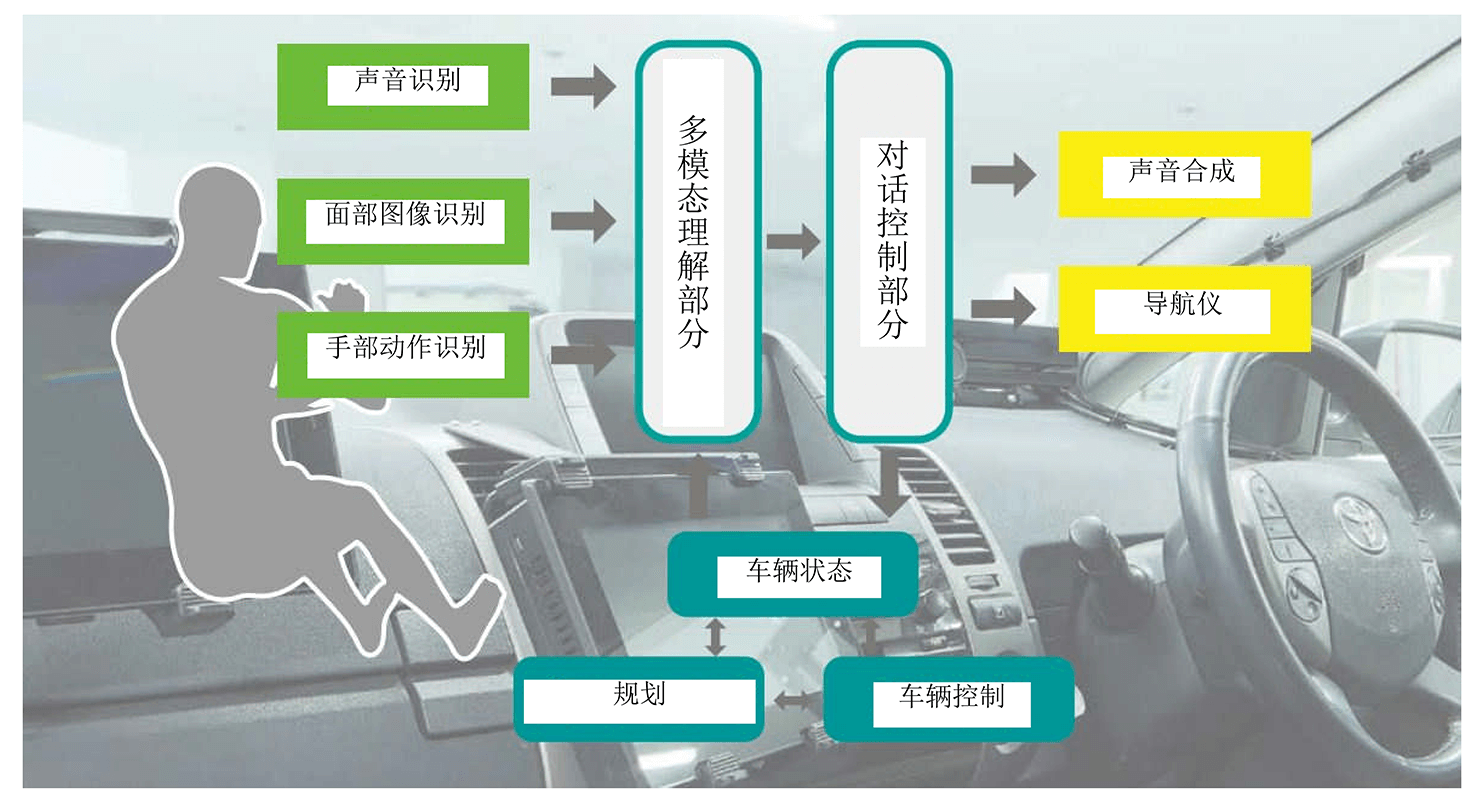
圖4:多模態界面自動駕駛汽車的示意圖。多模態理解部分會整合來自各類感測器的資訊,推測人的狀態和意圖。對話控制部分根據推測的意圖,啟動自動駕駛系統和車載導航儀。通過這兩種機制,成功實現了車輛、環境與人的協調。
另外,還可以同時處理多種輸入。人在行駛過程中發出「在這裏停下來」、在那裏轉彎」等指示語後,車輛會根據人的手勢和視線方向判斷具體指的是哪裏。如果詢問「那是什麼」,車輛也會根據視線的方向和地圖資訊回答出建築物的名稱,比如回答「那是圖書館」等。
以前雖然確立了通過自動駕駛前往目的地的技術,但在行駛途中指定停車地點或變更路線的系統都存在了許多需要解決的問題。最理想的方式是像坐計程車那樣,通過對話實現操控自動駕駛汽車。武田介紹說:「通過配備捕捉音聲、視線和手勢等人類狀態的感測器,車輛能回答車内人員提出的問題及變更路線,實現了可以人機交流的自動駕駛系統。這就是Harmoware的成功實例之一」。
使餐飲和物流數據化,提高作業效率和服務
自然且便於使用的多模態界面是所有智慧機器都需要的功能。另外,根據對環境的「認知」,「判斷」前進的方向和速度,「控制」方向盤和製動器的自動駕駛功能與機器人也是相通的。目前,在工廠以外的場所工作的服務機器人越來越受人期待,而在服務領域,機器人與人的交流比傳統製造業來得更加重要。
人機協作技術聯盟正在日本勞動力嚴重短缺的餐飲及物流現場,對被希望追加到Harmoware中的應用進行驗證實驗。武田說:「複數個人和物體以多種方式移動的現場很難手冊化,我們正在開發以Harmoware為平台,把人與智慧機器在限定的空間内的協調作業數據化的技術」。
日本Ganko Food Service公司(大阪府大阪市)在該公司經營的日本料理餐廳導入了傳菜用無人運送機器人(圖5左)。雖然從廚房到包廂前的走廊經常有員工和顧客經過,但傳菜機器人考慮到了安全方面的因素,當感測器檢測到有人和障礙物接近時會自動停下來,避免碰撞。

圖5:傳菜機器人原本是用來搬運材料的工業機器人,作為傳菜機器人使用時,為了與服務現場的氛圍協調搭配,對其進行了改造,包括採用和風圖案的外觀、用古琴聲作為運送提示音、使用竹簾門等。為便於餐廳的員工使用,把機器人的停止和前進等基本功能調整得非常容易操作。
武田表示:「由於傳菜機器人能代替女服務員傳送料理,女服務員可以用更多的時間來接待客人」。該系統還採用了產業技術綜合研究所開發的室内定位系統測量餐廳員工與機器人的移動路線並將其數據化。其目的是通過使操作視覺化,驗證人與傳菜機器人的協作能否提高服務品質和效率。
人機協作技術聯盟還計劃從2019年開始,通過包括初創企業在内的3家公司的合作,在物流現場實施驗證實驗。開發使用Autoware的全自動駕駛系統的Tier IV公司(愛知縣名古屋市)將提供對工廠和倉庫内的物流進行支持的小型搬運機器人(圖5右);構築和銷售物流系統的Frameworx公司(東京都千代田區)將對人的行動及機器的位置等進行測量和解析;物流AI領域的學生初創企業OPTIMIND公司(愛知縣名古屋市)將利用AI分析獲得的數據,找出更有效率的配送路線。
武田介紹說:「通過模擬員工與機器人的部署位置和移動路線,能發現哪個位置有多餘的人手,員工的心情是怎樣變化的」。根據分析結果,可以讓二者分擔不同的工作,相互協調,機器人能完成的工作就交給機器人去做,機器人無法完成的工作則由人來做等,從而提高服務的品質和機器人的運轉率,改進作業系統。
以開源方式加速研發
Autoware已經作為自動駕駛領域的全球首個開源軟體免費公開。只要是用於研發用途,不但誰都可以使用,還能自由地進行改進。武田期待Harmoware能像Autoware一樣取得發展。
武田一哉 名古屋大學未來社會創造機構 教授
自動駕駛技術由許多種最先端的技術構成,因此一家企業以封閉的方式單獨開發是無法在世界最前緣競爭的。Autoware的目標是早期就實現開源化,藉助其他研究機構的力量加快開發速度,從而為盡快實現自動駕駛汽車做貢獻。Autoware目前已經得到國内外近200家大學和企業的採用,配備到了30多款車型上。
武田說:「開源的優點是即使花很少的資金,也能嘗試利用新技術。任何人都可以隨心所欲地使用,也便於成立初創企業」。目前已經有以Autoware為基礎技術的初創企業誕生,全球各地都在開發Autoware部件。初創企業將在推進Harmoware的持續開發和普及方面發揮重要作用。
武田把構成Harmoware的軟體和感測器等部件比喻為樂高積木。他說:「只要給孩子們提供樂高積木,他們就能根據自己的喜好創作出不同的作品。我的夢想是,把Harmoware變為任何人都可以自由製造出產品的開發平台,從中不斷誕生出新的企業、產品和服務。剛開始也許每個成果不大,但總有一天會誕生出優秀的作品,我非常期待那一天的到來」。「人機協作技術聯盟」的科研基金項目OPERA預定2020年度將會到達5年的資助期限,不過武田堅信:「Harmoware會一直堅持開源方式持續下去」。
(日文全文)
出處:JSTnews 2019年5月號
翻譯編輯:JST客觀日本編輯部











