日本理化學研究所(簡稱「理研」)開拓研究本部的專任研究員福田健次郎和主任研究員染谷孝雄、早稻田大學大學院創造理工學研究科教授梅津信二郎、新加坡南洋理工大學副教授佐藤裕崇等組成的國際聯合研究團隊,開發出了一種全長約6釐米的半機械昆蟲(馬達加斯加蟑螂),它可以通過貼在其身上的有機太陽能電池的電力進行操作。相關論文已發表在《npj Flexible Electronics》網路版上。

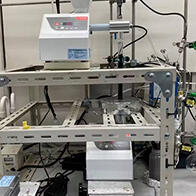
可充電的半機械昆蟲(馬達加斯加蟑螂),身長約6釐米(供圖:理化學研究所)
研究人員將超薄有機太陽能電池模組粘在機械蟑螂的腹部,並將3D列印出來的揹包粘在其胸部,裏面裝有無線運動控制模組和電池。當控制端通過電信號發出「右轉、「左轉」等指令時,會對其尾葉(尾部的感覺器官)施加電刺激,從而控制行進方向。
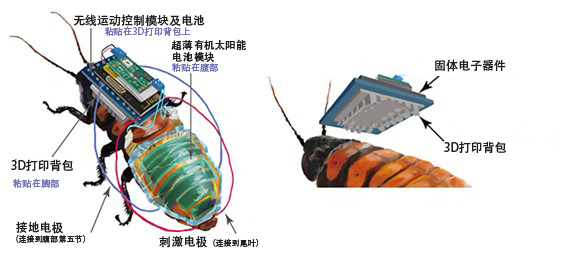
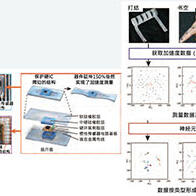
圖1 半機械昆蟲的概要及3D列印揹包(供圖:理化學研究所)
(左)在昆蟲腹部的背側粘貼超薄有機太陽能電池模組,通過柔軟的揹包將無線運動控制模組和電池(鋰聚合體電池)粘貼在其胸部的背側。為了向昆蟲輸入刺激信號,控制運動的刺激電極是用銀線連接到名為尾葉的感覺器官上的。
(右)用3D列印機製作的軟揹包採用柱狀構造,其形狀來自昆蟲胸部背側的曲面,能適應不同蟑螂之間的個別差異,電子設備可以穩固地安裝在不同的個體身上。
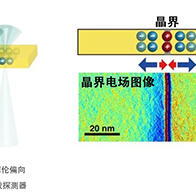
昆蟲在移動時腹部會發生變形,導致腹節有部分重疊,因此在將聚合體薄膜上製作的超薄型有機太陽能電池(3μm厚)貼在腹部背側時,採用了交替配置粘接劑區和非粘接劑區的踏腳石構造。在進行障礙物翻爬實驗時發現,該構造可以保持與沒有粘貼電池板時相同水平的翻爬性能。
此外還通過實驗確認,昆蟲從翻倒狀態恢復到常態的爬起能力會隨著薄膜變厚而降低,但是粘貼踏腳石構造的超薄有機太陽能電池後,翻身成功率與沒有粘貼時基本相同。
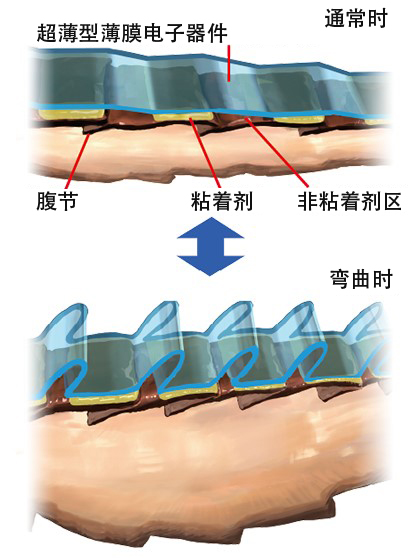
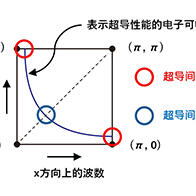
圖2 超薄有機太陽能電池安裝於腹部(供圖:理化學研究所)
通過採用粘接劑區和非粘接劑區交替的踏腳石構造,薄膜保留了一定程度的變形自由度,當腹部彎曲時薄膜能向外側彎曲。
粘貼的超薄型有機太陽能電池模組的有效面積為3.96平方釐米,最大輸出功率達到17.2毫瓦。
試驗證實,對活的半機械昆蟲照射模擬陽光充電30分鐘後,發現可以進行約2分鐘的連續無線通信,並確認到實際可以按照指示左右移動。
福田專任研究員介紹說:「機器昆蟲的課題在於需要大量的電力才能操作,但如果使用活體,就能以節能的方式控制昆蟲。此次的無線移動控制模組和電池是手工製作的,所以體積很大(6.5克)。但將來我們希望可以做得更薄更小,並安裝各種感測器,使其能夠用於災害時從廢墟中尋找需要救援的人等用途。」
原文:《科學新聞》
翻譯編輯:JST客觀日本編輯部
【論文資訊】
雜誌:npj Flexible Electronics
標題:Integration of body-mounted ultrasoft organic solar cell on cyborg insects with intact mobility
DOI:10.1038/s41528-022-00207-2