日本農研機構九州沖繩農業研究中心暖地水田輪作研究領域的中野洋組長助理(現任該機構日本農業研究中心轉換田研究領域首席研究員)等人組成的研究團隊宣佈,開發出了利用無人航空載具取得地面多處位置數據並進行校準的水田大範圍NDVI(Normalized Difference Vegetation Index,常態化差異植被指數)測量系統,通過診斷水稻生長情況自動計算追肥量。目前已為日本種植最廣泛的大米品種「越光」(Koshihikari)和西日本地區的主力品種「日之光」(Hinohikari)確定了追肥量計算公式,併計劃在未來將應用範圍擴大到其他品種。此次的成果克服了傳統無人航空載具測量過程中出現的問題,有望提高大量生產者和民營企業的水稻種植效率,並穩定水稻產量和質量。相關研究成果已發表在國際學術期刊《Crop and Environment》3月13日號上。

無人航空載具空中NDVI測量(供圖:農研機構)

人工地面NDVI測量(供圖:農研機構)
近年來,受極端天氣和氣候變化的影響,水稻產量和品質不穩定的頻率增多,今後也存在產量和品質進一步下降的風險。在日本,隨著農業從業人口的老齡化,農田整合化和企業的大規模經營化得到推進,開發能有效管理大規模農場的技術勢在必行。
氮素是水稻栽培中重要的肥料成分,抽穗前20天至抽穗期前後施加的氮素追肥量與產量的增加以及影響銷售價格的受害粒的減少呈正相關,但一旦使用過量,就會導致倒伏和味道變差,所以必須適量施肥。以往方法中,氮素追肥量是根據地面NDVI(常態化差異植被指數)測量結果等,通過生長診斷來估計的,但該方法需要作業人員在每個水田用攜帶型NDVI測量儀取得數據,需要花費大量的勞力。
對此,人們寄希望於通過無人航空載具實現生長診斷,空中NDVI測量方法(空中 NDVI)測量的是植物反射太陽的光,而地面NDVI測量方法(地面NDVI)測量的是植物反射測量儀的光,由於這一差異,因此無法用於生長診斷。
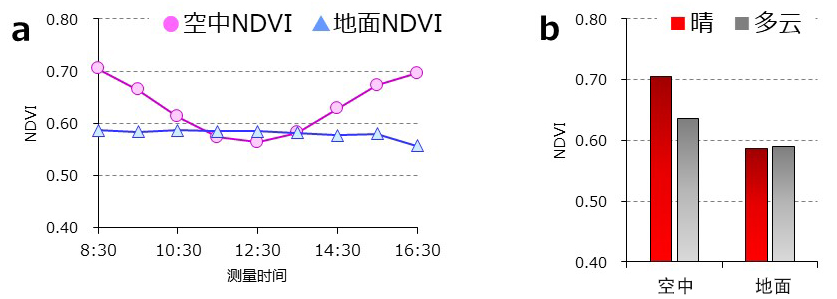
圖1 空中(無人航空載具)和地面測量的常態化差異植被指數(NDVI)與測量時間的關係(a),以及NDVI與天氣的關係(b)(供圖:農研機構)
此次研究團隊通過對空中NDVI進行校準提高了精度,並將其用於生長診斷。
首先,研究團隊調查了空中及地面NDVI與測量時間、天氣的關係,發現空中NDVI明顯受到太陽高度和天氣的強烈影響。
2020年和2021年,實際調查空中NDVI和地面NDVI與產量的相關後發現,地面NDVI表現出更高的相關。當研究團隊用多出地面NDVI校準了空中NDVI後,發現相關增加,證實了其可行性。當用於校準的地面NDVI數據增加時,相關進一步增加。
此次開發的系統如果以產量為目標,則在抽穗1~4周前用配備多光譜照相機的無人航空載具拍攝要進行診斷的整個田地,並使用影像分析軟體獲取空中NDVI。同時在地面對生長良好的部分、不好的部分和居中的部分(約3處)進行地面NDVI測量。雖然可以通過增加地面測量點來提高精度,但考慮到移動時間等,選擇3個點左右較為適宜。
其次,根據空中NDVI和地面NDVI的相互關係得到回歸方程式公式,用地面NVDI校準所有田地的空中NDVI。將目標產量和補充修正後的NDVI代入預先為各生長階段制定的追肥量計算公式中,計算出需要的追肥量。
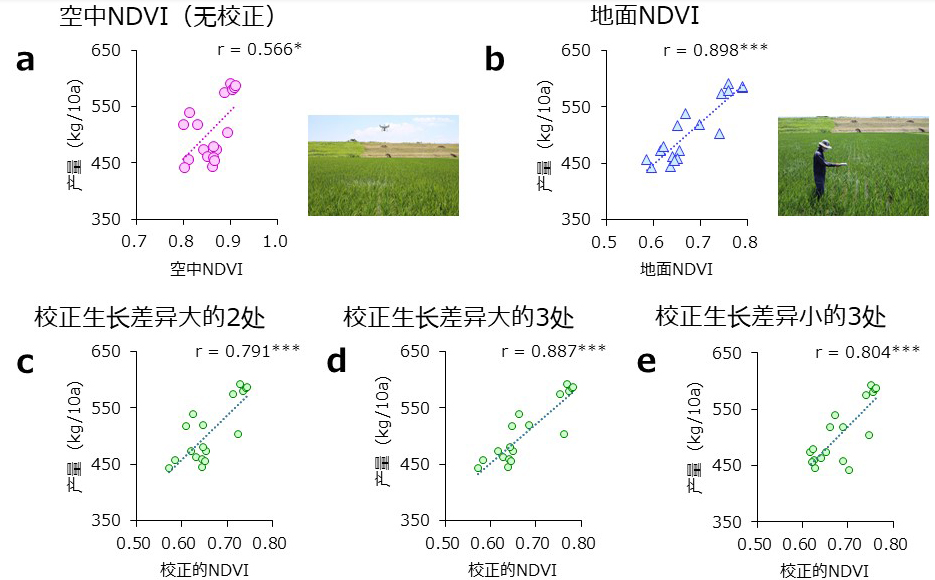
圖2 多年試驗獲得的無人航空載具空中測量的常態化差異植被指數(NDVI)與產量的關係(a)、地面測量的NDVI與產量的關係(b)、及校準後的NDVI與產量的關係(c、e)(供圖:農研機構)
在2021年佐賀縣進行的田間實證試驗中,用地面NDVI校準了空中NDVI後得出的所需追肥量為3.5kg N/10公畝,非常接近地面NDVI預估值(3.4),且實際產量達到了592±13kg/10公畝(目標產量的±5%以内)。2022年也得到了同樣的結果,同時也控制了倒伏和病害。僅使用空中NDVI計算出的所需追肥量為16.7kg N/10公畝。
據稱,本次開發的系統可通過農研機構提供的利用Excel製作的程序供企業等使用,還開發了構建在該機構伺服器上的旨在提高便利性的規格和功能,為了使民營企業等可以通過農業數據協作平台(WAGRI)用於各公司的農業經營管理系統。
目前已經製作了「越光」和「日之光」兩個品種的追肥量計算公式,能夠覆蓋日本約40%的水田耕作面積。今後,還將通過與各縣的公立試驗研究機構等的合作,擴大支持品種,進而提高便利性。
中野組長助理表示:「今後,不僅是計算需要的追肥量,我們還將嘗試準確捕捉地面雜草和病害蟲的發生情況,與此次的技術同樣,對空中獲取的數據進行校準,開發出能夠判斷受害情況和農藥噴灑的時機,或者是否需要噴灑的技術。另外,我們還在推進麥類追肥量計算公式的制定」。
原文:《科學新聞》
翻譯:JST客觀日本編輯部
【論文資訊】
雜誌:Crop and Environment
論文:Predicting rice grain yield using normalized difference vegetation index from UAV and GreenSeeker
DOI:doi.org/10.1016/j.crope.2023.03.001