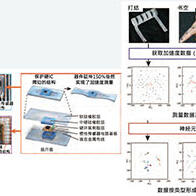
日本新能源產業技術綜合開發機構(NEDO)與熊本大學合作,針對需要與人物理可用能性接觸的機器人,為使其能安全工作而開發了機器人皮膚感測器,該感測器具有與人類的皮膚感覺相同的性能(圖1)。

圖1:在加工成凹面形狀的基材上塗覆壓電膜,以及製作的柔性薄型壓電膜器件
在本次開發中,研究小組改良了以往的噴塗噴霧技術,確立了長時間噴塗噴霧的技術和噴槍自動驅動系統,成功形成了均勻且再現性良好的大面積壓電膜。由此,通過在各種不同形狀和尺寸的機器人表面噴塗壓電壓力傳感器,便可製作皮膚感測器。
配備該感測器後,與人協作型機器人可以安全地工作,增加了社會應用的可能性。其他用途方面,利用該技術在移動產品、日用品、汽車及機翼等不同形狀和尺寸的對象的表面噴塗壓電壓力傳感器,可測量表面壓力分佈和振動;利用製作的壓電膜的耐熱衝擊性,即使在超高溫下也能對特殊形狀的物體實施超音波NDI。
【成果1】確立溶膠-凝膠噴塗法的連續塗覆工藝
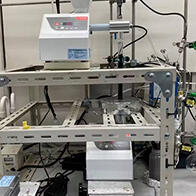
溶膠-凝膠噴塗法主要用來製作超音波探傷檢測用換能器(Transducer),以往的工藝塗覆面積比較小,無法用於機器人和大型設備。所以,研究小組確立了能擴大溶膠-凝膠噴塗法的製作工藝面積的連續塗覆工藝(連續溶膠-凝膠噴塗法)。將該連續溶膠-凝膠噴塗法應用於自動塗覆裝置進行驗證後,確認即使大面積也能均勻製膜。此次確立的方法原則上對塗覆對象的基材尺寸沒有限制,可以實現大面積均勻塗覆(圖2)。
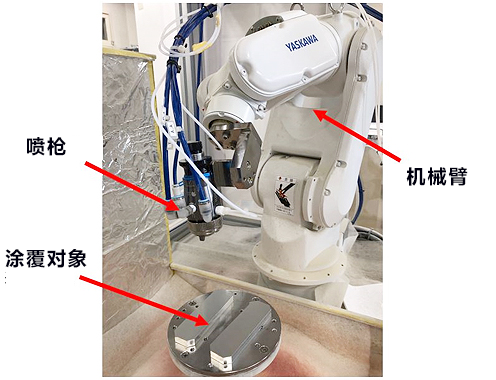
圖2:利用連續塗覆工藝實施曲面塗覆的機械臂式塗覆裝置
【成果2】驗證壓力傳感器的特性
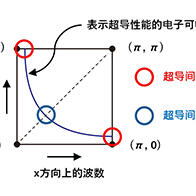
研究小組利用上述連續噴塗工藝製作了壓電器件,並評價了壓敏特性。經驗證確認,可以實現與人類觸覺中最敏感的指尖同等水平的1mm空間解析度;可以檢測到人類皮膚能感受到的幾Hz至1kHz的振動,而且平均靈敏度為25mV/N(圖3);針對人類皮膚幾克重的平均壓覺,也能充分輸出信號。
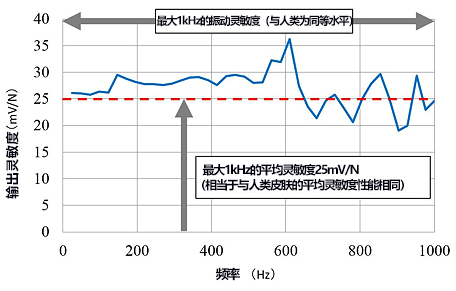
圖3:不同頻率對壓力分布感測器的力輸入的靈敏度
【成果3】驗證壓力分布測量感測器的製作工藝
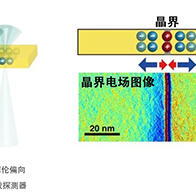
要想實現本項目瞄準的高精細壓力分布測量,需要高密度配置電極和布線。這種情況通常採用以垂直和水平方向排列的電極布線圖案夾住壓電膜的矩陣陣列結構(如圖4)。此次成功地在具有下部電極圖案的絕緣基底層上塗覆和燒製了壓電膜。另外還在該壓電膜上形成了上部電極圖案,成功地從上下電極的交點處獲得了輸出。
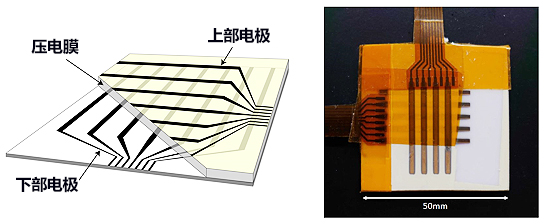
圖4:獲得壓力分布情況的矩陣陣列結構和試製的感測器

圖5:利用溶膠-凝膠復合壓電感測器檢測脈搏(左)和實施超音波探傷檢測(右)
文:JST客觀日本編輯部翻譯整理