由東京大學研究生院資訊理工學系研究科的竹內昌治教授和任新竹(碩士研究生),以及早稻田大學理工學術院基幹理工學部的森本雄矢副教授組成的研究團隊發表研究成果稱,通過使用人體來源的培養肌肉細胞,開發出了多關節生物混合型機械手。研究團隊通過將細長的培養肌肉組織捆綁在一起,實現了高收縮性能,使得具有多關節連桿結構的手指能夠完成彎曲的動作。這一成果有望應用於開發無需電源,由佩戴者的意識驅動的義肢,以及藥物試驗模型。相關研究成果已發表在國際學術期刊《Science Robotics》2月12日刊上。
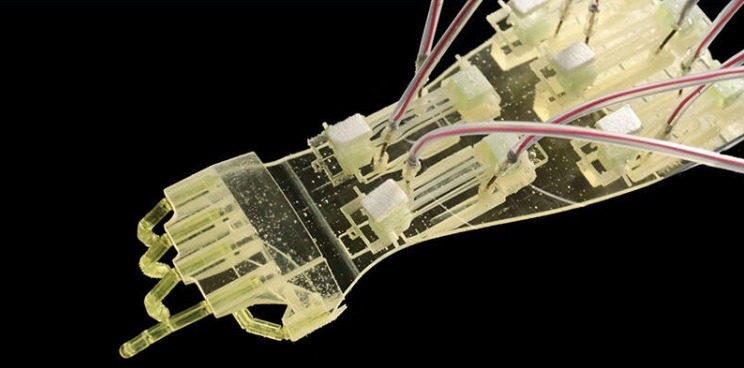
多關節生物混合型機械手(供圖:東京大學)
生物混合型機器人是一種將生物組織與人工材料融合的機器人,有望通過利用生物組織,實現既往機械機器人所不具備的柔韌性和自我修復能力等。
此前報告的使用肌肉組織的生物混合型機器人主要以單一關節驅動為主,由於肌肉組織中心部分的細胞會壞死而無法培養較粗的肌肉,因此很難產生強大的力量(收縮力),機器人的尺寸通常只有3釐米左右。要驅動更大的結構,需要具有更高輸出和更長收縮距離的肌肉驅動執行器。
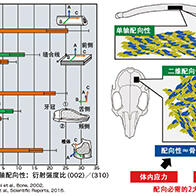
為此,研究團隊此次設計並開發了「多肌肉組織執行器(MuMuTA:Multiple Muscle Tissue Actuator)」。MuMuTA採用將培養的細長人體肌肉組織捆綁在一起的結構,成功實現了高收縮力和高收縮長的兼顧,達到了約8毫牛的收縮力和約4毫米的收縮長。
MuMuTA的製作方法是,首先把肌肉組織排列好之後再進行培養,培養成熟之後再將其像竹簾一樣捲成卷狀(命名為壽司卷工藝)。
對培養的肌肉組織特性進行評測後發現,培養的肌肉組織與生物肌肉的特徵相似。通過連續刺激,確認培養肌肉組織出現了與生物肌肉類似的因疲勞導致的收縮力下降,以及通過休息恢復收縮力的現象。此外,通過製作不同寬度的多條肌肉組織並比較它們的收縮能力後發現,較細的肌肉組織收縮效率更高。
接下來,研究團隊將製作的MuMuTA與機器人骨架相結合,成功構建了世界最大的18釐米多關節生物混合型機械手。搭載的多關節連桿結構,可將MuMuTA的直線收縮運動通過線驅動結構轉換為關節的旋轉運動,就如同人類手指的肌腱和肌肉一樣。每根手指都內置有一個MuMuTA。
在浸漬在培養液中的狀態下,通過施加電場可以分別驅動每根手指,研究團隊還成功移動了物體(移液器吸入水頭)。
竹內教授表示:「展望未來,我們希望能夠進一步提高輸出功率。我們計劃提升每條培養肌肉組織的收縮性能,並將它們結合在一起,目標是至少能夠拿起蘋果大小的物體。雖然目前還處於基礎研究階段,但如何在體外製造出與體內相似的肌肉組織仍是一個挑戰。未來的義手和義足可能會與生物體融合,因此這項技術在義肢應用方面備受期待。此外,我們認為它還可以作為醫藥開發中藥物試驗的模型。」
原文:《科學新聞》
翻譯:JST客觀日本編輯部
【論文資訊】
期刊:Science Robotics
論文:Biohybrid hand actuated by multiple human muscle tissues
DOI:10.1126/scirobotics.adr5512