日本東北大學研究生院工學研究科的大脅大副教授、鶴岡市立加茂水族館的池田周平飼養課系長、奧泉和也館長,以及東京大學研究生院情報理工學系研究科的Austin Max Philip特任助教、中嶋浩平副教授等人的研究團隊,成功開發出了通過對水母肌肉施加電刺激誘導其游動,並利用簡易人工智慧(AI)預測其運動的技術。這一成果有望推動用於海洋調查和環境保護的自律型賽博格機器人的開發。相關研究成果已發表在《Nature Communications》5月23日刊上。
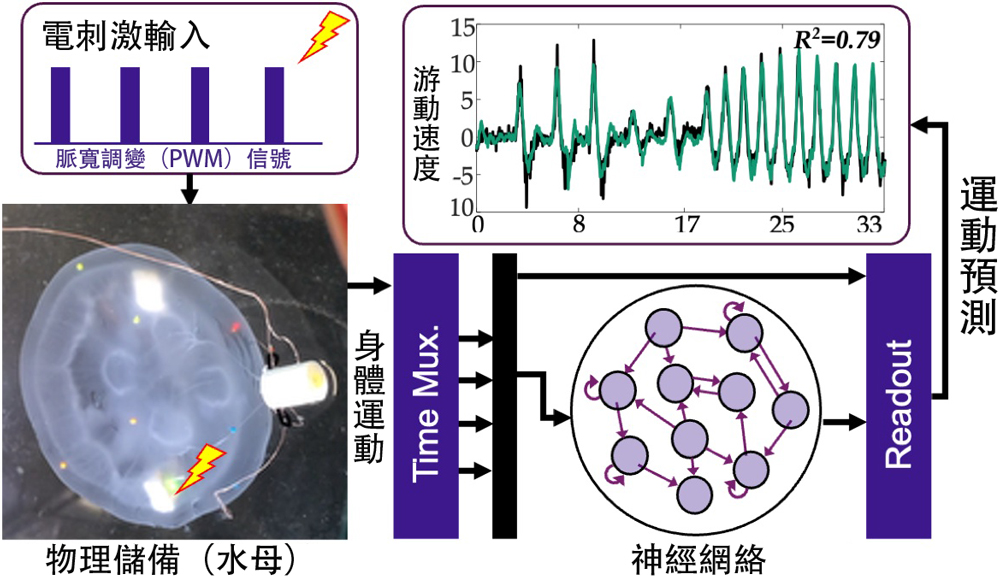
圖1. 水母混合汁算系統的運動預測示意圖(供圖:日本東北大學研究生院工學研究科大脅大副教授,著作權所有大脅大副教授)
將生物所具備的卓越運動性能和環境適應能力融入人工系統的生物賽博格技術備受關注。這類系統的實現,離不開能與生物神經、肌肉、感覺器官聯動的電子控制系統的構建。
廣泛分佈於日本沿海、在水中具有高效運動性能的水母,通過節律性鏈段運動傘狀身體產生推進力來游動,且具有自主改變行進方向的能力與自我修復功能。
雖然此前已有研究嘗試將電子控制與真實水母融合在一起的「水母賽博格」,但僅能實現速度控制,尚未能誘導複雜的旋迴運動或預測其動作。要實現這一目標,需要理解水母與流體的複雜相輔作用而產生的運動,以及自發神經活動與外部刺激之間的關係。
對此,研究團隊以開發出利用水母天然「身體性智慧」的新型賽博格技術為目標推進了開發。
研究團隊首先利用水母柔軟的身體與水環境的相輔作用,構建了可預測和控制高效靈活運動的系統。通過在水母的環狀肌中插入電極,並利用脈寬調變信號模擬生物神經信號來施加電刺激,誘發水母的肌肉收縮,以此再現了接近自然狀態的浮游行為。
接下來,為了精確測量和預測水母的運動,研究團隊還開發出三維運動捕捉系統。該系統可採集水母的身體變形、移動速度以及詳細的浮游軌跡等運動數據。
研究團隊在水母體內嵌入可反射紫外線的標記物,通過上方及反射面從三個方向記錄影像。記錄的數據經深度學習演算法(DeepLabCut)解析後,被重新框架為三維運動模型。
通過上述一系列的研究,研究團隊實現了在最佳時機給水母肌肉施加電刺激,獲得了基於水母自發節律的游動誘導。
此外,研究發現水母游動的自發節律產生自組織臨界現象。該現象指系統無需外部微調節即可自主過渡到臨界條件的性質,在自然界中較為常見。
研究團隊進一步應用了一種被稱為物理儲備計算的計算方法,將水母的自然運動作為「智慧」的一部分加以利用,構建了用於預測其運動的AI模型。
通過活用生物原本具備的運動性能,有望開發出低功耗、低計算量驅動的賽博格機器人控制技術。
大脅副教授表示:「以水母為代表的生物,可能具備尚未被揭示的能力。我們希望致力於開發利用這些能力的可持續性賽博格技術。」
原文:《科學新聞》
翻譯:JST客觀日本編輯部
【論文資訊】
期刊:Nature Communications
論文:Harnessing Natural Embodied Intelligence for Spontaneous Jellyfish Cyborgs
DOI:10.1038/s41467-025-59889-7