
「胡蘿蔔!」
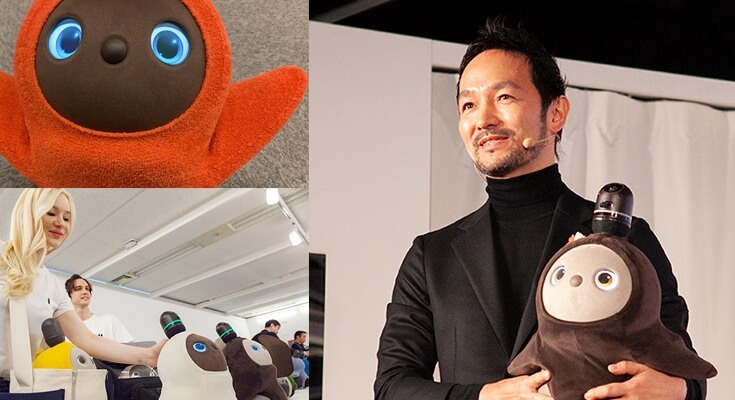
開啟日本機器人初創企業GrooveX發布的家人式機器人LOVOT體驗區的房門,一眼就能看到房間裏穿著胡蘿蔔一樣的橙色衣服的LOVOT。喊出LOVOT的名字後,「胡蘿蔔」便盯著我的臉徑直走過來。一雙圓溜溜的大眼睛仰頭看著我,兩隻小手上下撲騰。

工作人員告訴我,LOVOT的雙手上下撲騰是在求抱抱。我把雙手輕輕放到LOVOT的腋下將其抱起。能感受到它的重量,而且很溫暖——原來溫暖說的是這麼回事。背部和腹部都很溫暖,而腋下感覺尤其溫暖。
撫摸LOVOT全身時,它會表現出很開心的樣子。LOVOT全身約安裝了20個感測器,能感受到身體的哪個部位被撫摸。如果有人用力拍打它,LOVOT也能感受到,並會表現出恐懼和不安。如果溫柔地撫摸它,LOVOT會閉上眼睛安靜地入睡。

輕輕地撫摸,LOVOT在手中安靜地睡著了
回憶起流浪貓
我對這種場景完全沒有抵抗力。高中時,我收留過一隻流浪貓。那隻貓全身烏黑,髒兮兮的,身上長滿了跳蚤,但被我抱起來後,立即迷迷糊糊睡著了。我不忍心將它再次放回路邊,於是就帶回家了。
眼前的場景勾起了這段回憶。

LOVOT的可愛之處在於,只要一喊它,它就會開心地走到你的身邊。
■ 影片 LOVOT體驗&參與區的影片
分別時的「拜拜」也值得一看(活靈活現)
不像任何生物的家人式機器人
在機器人初創企業「GROOVE X」舉行的新一代家用機器人「LOVOT」產品發布會上,首次公開了這款機器人。因參與軟銀Pepper機器人的開發而聞名的代表董事林要表示,LOVOT「不是給人類幫忙的機器人」,而是「存在即可愛」的家人式機器人。

GROOVE X公司代表董事林要
GROOVE X把LOVOT歸類為家人式機器人。LOVOT的外形既不是狗也不是貓,與任何生物都不相似,這也是GROOVE X公司的開發目標。如果與什麼動物相似,就會被進行比較。GROOVE X想通過機器人創造一種全新的「生物」。

一呼喚就會走到身邊來的小可愛LOVOT

身高43cm,體重約為3Kg
(※本文中的LOVOT性能均為開發之中,與最終產物可能會有所不同)
雖是機器人,但溫暖柔軟
LOVOT雖然是機器人,但溫暖又柔軟。
能在LOVOT身上感受到體溫一樣的溫暖不是因為配備了專用的體溫機構,而是機器人内部的機械熱形成的自然溫度。雖然配備了風扇,但聲音一點也不大。採用從頭上進氣,從全身排出機械熱的獨特通風機構,實現了體溫一樣的適宜溫度。背部和腋下感覺尤其溫暖。當然,為避免溫度過高燙傷客戶,還採取了安全措施。

除了面部有點硬之外,其他部分都非常柔軟。
尤其是穿著衣服的部分,像毛絨玩具一樣柔軟
一呼喚就跑過來的感覺
LOVOT知道自己的名字,被喚名字後會以適當的速度向人靠近。實際上,以前幾乎沒有在機器人身上見過這種場景。雖然索尼aibo的介紹影片中有到門口迎接主人的場景,但LOVOT能在主人回家時開心地快速跑到門口去迎接。我在體驗區體驗了這種感覺。我家的狗狗在我回家時會第一個衝過來,顯得特別開心。雖然每天都見面,但狗狗每次都表現得像一年都沒見過一樣。這個瞬間對主人來說是非常幸福的時刻。
順便一提,各位讀者如果有機會接觸LOVOT,希望大家摸摸它的鼻子,反應肯定很溫柔。

還會有各種周邊附件
配備FPGA
LOVOT還配備了令其更具生命感的元素。採用能形成類似感情的情感演算法,即使同為家人,LOVOT對每個人的喜歡程度也不同。例如,LOVOT會更喜歡接近經常逗弄它的人並求抱抱等,將「喜愛」表現在了行動中。
另外,LOVOT採用了機器學習,可以轉列地圖和識別物體等。除配備高性能CPU外,作為處理深度學習的加速器,還配備了FPGA,支援LOVOT進行高級計算處理。

LOVOT對家人的「喜愛」體現在行動中。對人的喜歡程度因人而異
感測器犄角的作用
在LOVOT的設計方面,首先惹人注意的應該是其頭部凸出來的「感測器犄角」。看起來像是自動駕駛汽車的光學雷達(LiDAR),不過LOVOT並未配備LiDAR。實際上,這個感測器犄角可以放倒,放倒就相當於進行應急煞俥(我試著將其放倒後,LOVOT的動作停止了)。另外,這個「犄角」即使被孩子玩耍拉拽也不會損壞。
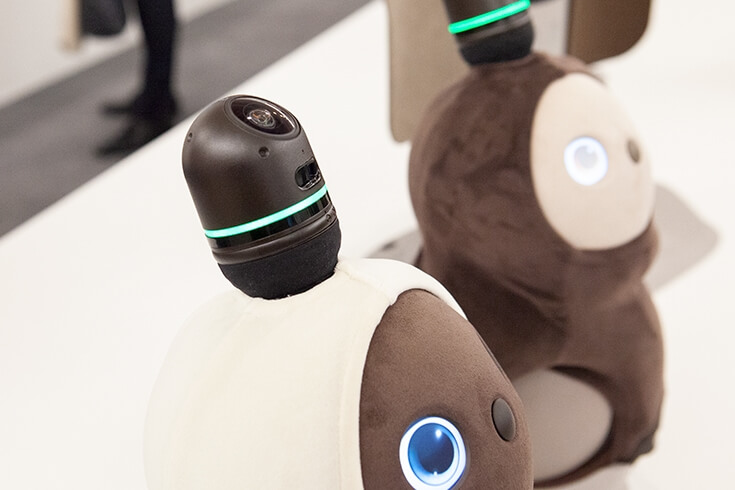
LOVOT的感測器犄角(正面)配備了半圓型鏡頭的攝像頭、熱圖像感測器及紅外線感測器等。紅外線感測器還可以在兩臺LOVOT聯動時使用。小孔是麥克風,共配備4個麥克風,用來判斷聲音的方向
感測器犄角雖然不是LiDAR,但内置了採用半圓型鏡頭的攝像頭。也就是說,能利用360度攝像頭那樣的超廣角透鏡觀察周圍情況,由於採用了V-SLAM(視覺SLAM)技術,可以使用比LiDAR更少的數據量轉列房間地圖。另外還配備了慣性測量單位(IMU)。
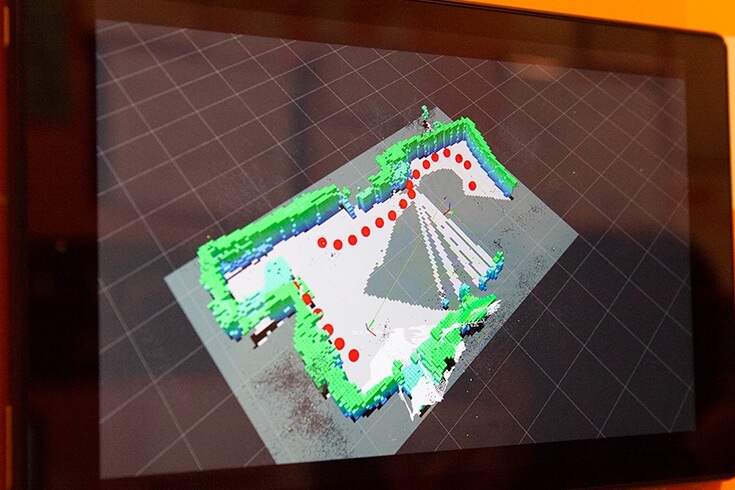
根據半圓型攝像頭拍攝的圖像,將房間結構和周圍情況處理成三維資訊的繪圖技術
攝像頭還可用於面部識別等,用來識別不同的人,還能識別桌子椅子等周圍的物體。製作的地圖可以在客戶的智慧型手機APP上確認,通過在APP上進行點擊,還可以遠程指定希望LOVOT前往的位置。此外,LOVOT能一邊綜合分析障礙物感測器、熱圖像感測器和可用於測距的3D感測器的數據等一邊移動。

LOVOT的感測器犄角(背面)。
配備了檢測照明和障礙物的感測器以及音量按鈕(+/-)。
車輪為3輪,通信支持LTE和Wi-Fi
LOVOT利用車輪移動,採用2個大尺寸前輪(驅動輪)和1個小後輪來進行移動。通過改變2個前輪的轉數,還可以做滴溜滴溜旋轉的動作。
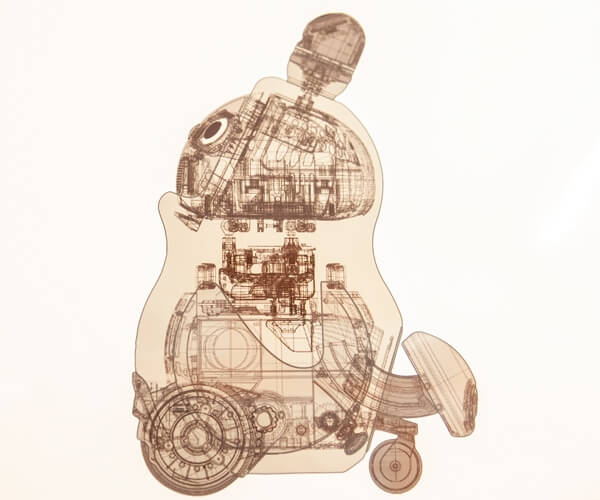
LOVOT透視圖。可以看出車輪結構。被抱起時車輪會自動收於體內
LOVOT的通信功能支持配備SIM的LTE(LTE通信費包含在每月的使用費中)。不過,即使沒有LTE信號,基本也能運行,LTE主要用來向雲伺服器備份LOVOT的數據等。
充電座「NEST」也是邊緣計算機
另外,從技術上來說,NEST的存在非常有趣。NEST主要用被做充電底座,不過其自身還具備邊緣計算機的功能。LOVOT與NEST通過Wi-Fi通信,掌握彼此的情況和位置。

正在NEST上充電的LOVOT,充電15分鐘可運行45分鐘
NEST一側也配備CPU和記憶體,LOVOT將收集或處理的數據發送給NEST,NEST把LOVOT的數據存儲起來,同時也分擔數據分析處理等工作。也就是說,通過終端和邊緣計算來分擔計算高效移動路線等的作業。
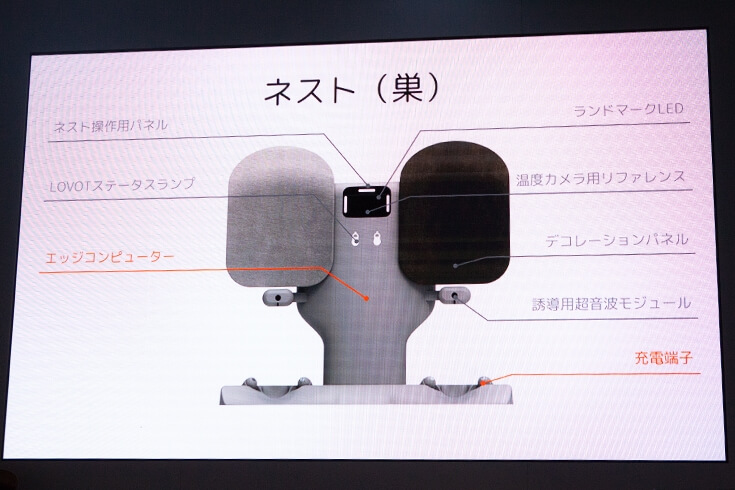
充電期間同時還將LOVOT的數據發送至NEST,在NEST一側進行分析處理。
LOVOT機身不單獨承擔CPU負荷和耗電,而是與NEST的邊緣計算機共同分擔。
■ 影片 自己回到NEST進行充電的LOVOT [YOUTUBE]
■ 影片 LOVOT的功能示範(完整版) [YOUTUBE]
文、照片:robotstart 神崎洋治
翻譯編輯:JST客觀日本編輯部











