
日本產業技術綜合研究所(以下簡稱「產綜研」)與大阪大學和中部大學合作,共同開發出能在製造流程中難以實現自動化的部件供應作業和組裝作業中輕鬆導入機器人的AI技術。
該技術包括①纏繞部件供應技術、②使用工具的組裝作業規畫技術、③視覺作業高速化技術這三項,已從2019年8月29日開始陸續在特設網站(https://nedo-robot-ai.jimdofree.com)上公開相關軟體。利用這些技術,在複雜的作業流程也可提高生產線的設計效率、縮短作業時間。
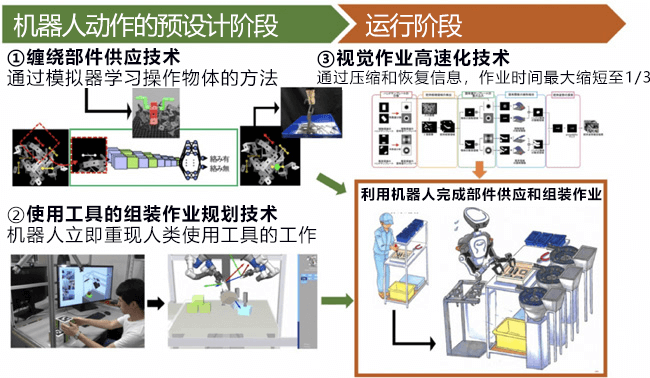
圖1:此次開發的AI技術的整體示意圖
此次開發的具體技術包括以下3項。
①纏繞部件供應技術:無需使用實機,僅通過模擬即可學習困難的作業
通過反復試誤學習困難的作業,這對機器人來說是有效的作業規畫方法。不過,由於需要利用實際機器人執行大量的作業,因此很難在生產現場投入實際使用。此次根據作業的難度,區分使用基於傳統特徵量(根據人類設計的順序理解和識別人類預先關注的資訊)的方法和基於模擬的深水層學習方法,實現了不使用實機的物體操作學習。由此,通過在模擬器上再現散亂堆疊的物體是否纏繞,並在模擬器上進行學習,實現了讓機器人避開可能纏繞的部件取出其他非纏繞部件的操作。取出成功率與以往利用實機學習時基本相同,約為90%。每個部件隻需模擬約5小時(期間無需人工干預),可輕鬆學習以前人類必須緊盯著機器人學習1~2天的困難教學作業,能減少供應部件的預行動計劃的作業時間和工人的勞動量。
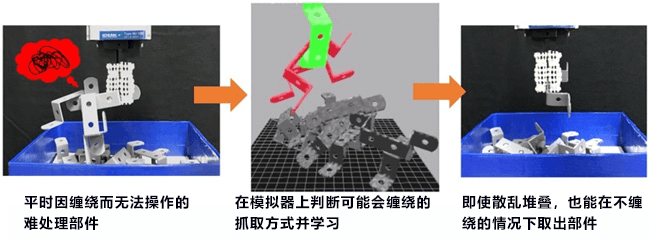
圖2:通過模擬學習挑揀疑難物體的方法
②使用工具的組裝作業規畫技術:基於模仿的即時教學和工具操作
要想教機器人學習複雜的組裝作業,程序專家要花費大量的精力和時間。此次開發了人類在攝像頭前示範組裝作業,機器人當場就能立即模仿的方法。以前教機器人學習需要掌握關於機器人的高級專業知識,而新開發的方法則隻需在製造現場從事組裝作業的工人示範平時的手工作業,機器人就能自主模仿這種作業。以前人類要花1~2天進行教學的用螺絲鑽擰螺絲的作業等使用工具的精細組裝作業,現在隻需示範幾分鐘,機器人就能學會,當場立即就能開始執行任務。
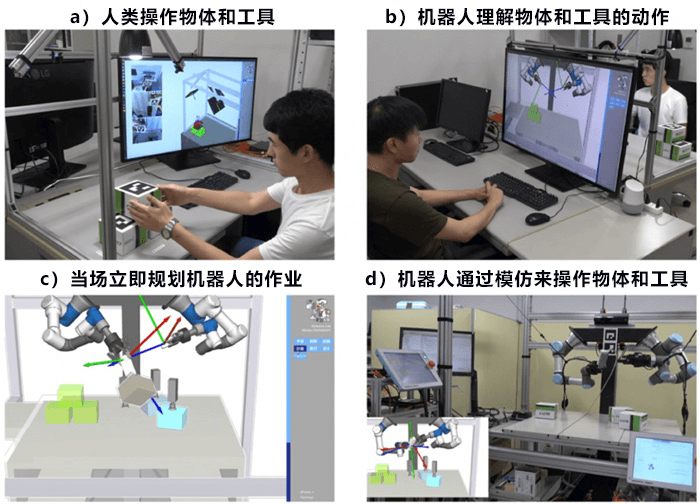
圖3:機器人立即模仿人類的手工作業
③視覺作業高速化技術:有效壓縮和恢復用來操作物體的視覺資訊
機器人抓取物體時,要根據其視覺功能獲得的圖像來計算抓取物體的位置。計算時間直接關係到作業過程中的等候時間,因此如何提高計算速度至關重要。此次開發了對具有視覺功能的機器手獲取的圖像數據進行矩陣分解來有效壓縮和恢復視覺資訊的處理方法,削減了檢測夾持位置所需的計算時間。應用於市售的普通夾持位置檢測處理時,將該方法所需的計算時間最大縮短至1/3。
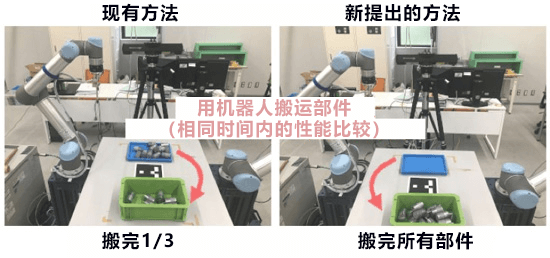
圖4:通過提高實際作業運行過程中的作業規畫速度,提高作業效率
文:JST客觀日本編輯部翻譯整理











