
日本新能源產業技術綜合開發機構(NEDO)正在推進「新一代人工智慧與機器人核心技術開發」項目,此次與日本DOUBLE Research and Development公司和都立產業技術高專合作,開發出了配備可變剛性機構的三指機械手,具備能抓握不同形狀物體的抓握多樣性,而且可根據動作固定手部姿態(圖1)。
這款機械手的各個手指利用一個驅動裝置追隨物體的形狀,能應對具有複雜形狀的抓握對象。此外,還配備能將各個手指的姿態固定(鎖定)在任意位置的機構,提高了抓握位置的精度。
利用新開發的這款機械手,以前需要根據抓握的物體更換機械手的生產線以及處理各類物體的物流倉庫等,有望實現分揀作業的自動化、降低機械手的導入成本。
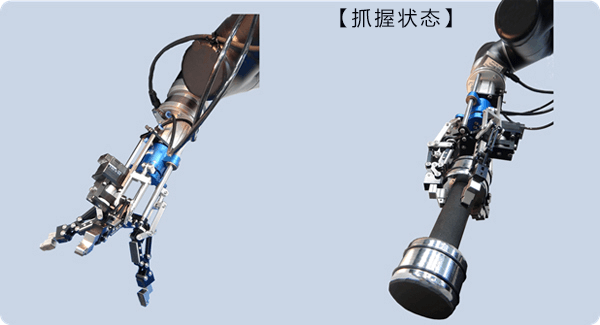
圖1:「D-Hand Type R」
表1:「D-Hand Type R」的標準性能參數
|
抓握力 [N] |
60 |
|
|
抓握開口寬度 [mm] |
180 |
|
|
承載重量 |
包覆式抓握 [kg] |
10 |
|
指尖抓握 [kg] |
5 |
|
|
開關速度 [mm/s] |
450 |
|
|
重複精度 [mm] |
0.1 |
|
|
手部重量 [kg] |
1.5 |
|
該機械手的手指採用了此前開發的名為「機巧」的機構。此前的機構在抓握物體時,僅利用一個驅動裝置驅動多個指關節,在各手指彎曲時追隨抓握物體的形狀,但控制時留有餘量,對外力的承受能力較弱,存在無法固定住抓握的物體的課題。
此次針對這一課題開發了新的3D柔性單元,能在追隨物體形狀的狀態下固定住各手指,從而不容易受外力影響,而且能保持住抓握的姿態。具體來說,3D柔性單元在準備抓握時處於可動狀態,會根據物體的形狀移動,抓住物體後就變成固定狀態,從而將對象物體的姿態固定在任意位置(圖2)。
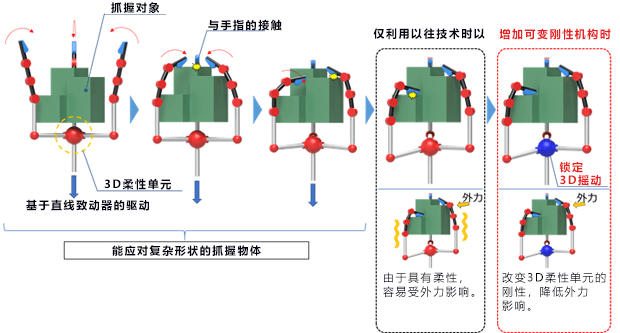
圖2:抓握功能及特徵的概要圖
利用這樣的機械手,能以各種姿態抓握形狀各異的物體,不僅是製造和物流行業等的簡單搬運用途,通過改變機械手的剛性,還能完成加工工序和組裝工序的作業。例如在把粗料放到加工機夾頭上的工序,當人用手操作時,有時會減輕力度,從而靈活移動手指和手腕關節,使抓握的物體進入插入部,有時會加大力度來固定住關節的動作完成操作。新開發的機械手採用了可以像人類那樣根據前臂和手腕的動作固定手部姿態的可變剛性功能,能取代需要發揮人類靈活性的手工作業,還可實現多品種分揀作業的自動化(圖3、圖4)。
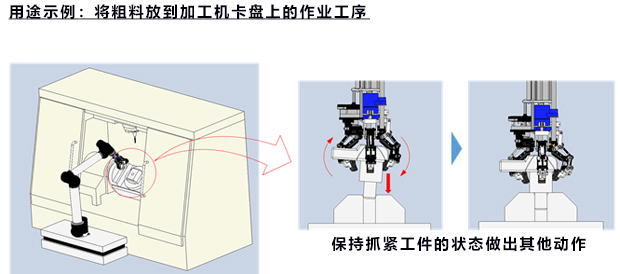
圖3:用途示例及其效果
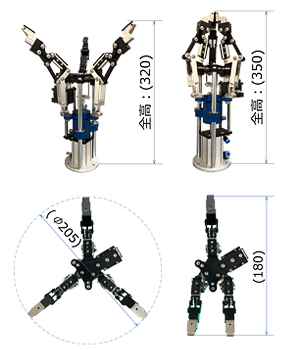
圖4:「D-Hand Type R」標準款的大致尺寸
此次開發的機械手「D-Hand Type R」從12月5日開始接單生產,還計劃在12月18日至21日於東京有明國際會展中心舉行的「2019國際機器人展」(iREX2019)上展出。
<展會資訊>
2019國際機器人展(iREX2019)
會場:東京有明國際會展中心 青海·西·南展廳
會期:2019年12月18日(週三)~21日(週六)
網站: 2019國際機器人展
文:JST客觀日本編輯部翻譯整理











