
日本國立研究開發法人新能源產業技術綜合開發機構(NEDO)與中央大學理工學部中村研究室合作,利用軸向纖維強化型人工肌肉用橡膠的拉伸結晶特性防止了裂紋的擴大,成功將人工肌肉的壽命最大延長100倍。今後計劃將該成果應用於可變粘彈性下肢輔助裝置等。
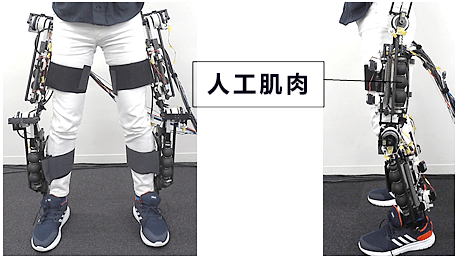
圖1:採用此次開發的長壽命型軸向纖維強化型人工肌肉的可變粘彈性下肢輔助裝置Airsist
在老齡化社會,勞動力短缺已成為嚴重問題,目前正積極通過業務自動化和機械化來提高效率,但在農業、製造業和護理等領域,因作業效率問題和空間不足等原因,有些工作難以實現自動化和機械化。因此,身體佩戴式輔助裝置等以減輕作業負擔為目的的產品的實用化備受期待。
身體佩戴式輔助裝置使用的驅動裝置(致動器)之一是軸向纖維強化型人工肌肉,是氣動橡膠人工肌肉的一種。這種人工肌肉採用在橡膠管中插入軸向對齊的強化纖維的結構。向其施加氣壓後會在半徑方向膨脹,在軸方向收縮,可作為致動器使用(圖2)。另外,這種人工肌肉輕而柔軟,在低氣壓驅動下最大能收縮38%以上等,與普通的McKibben型人工肌肉相比具有優異的收縮特性。但缺點是由於橡膠會嚴重變形,容易因為橡膠劣化而出現裂紋,壽命比較短,成為實用化的課題。
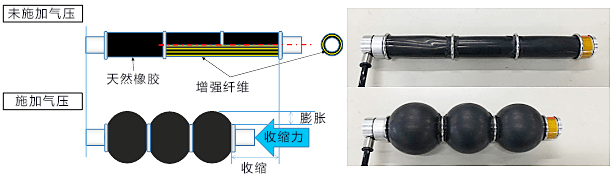
圖2:軸向纖維強化型人工肌肉
此次的成果
圖3是通過橡膠的拉伸結晶特性延長使用壽命的模型。橡膠受到外部應力的作用變形時,當應力達到一定程度,橡膠分子鏈結合最弱的部分就會被切斷。斷裂後,負荷會轉移到相鄰的分子鏈上,導致這條分子鏈也被切斷。這個過程一直重複的話,裂紋會不斷擴大,並最終斷裂。但通過利用橡膠的拉伸結晶特性,隨著拉伸形成的晶體層會防止裂紋擴大,可以延長橡膠材料的使用壽命。
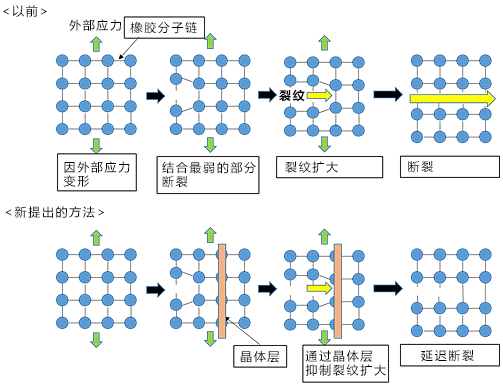
圖3:通過晶體層抑制裂紋擴大的模型示意圖
圖4是通過廣角X射線繞射實施的晶體層測量結果(上)和天然橡膠的應力應變曲線(下)。應力應變曲線的橫軸為應變,縱軸為應力。測量時將長度拉伸至原來的7倍後再使其收縮恢復原狀(藍色三角形表示拉伸和收縮的方向)。在廣角X射線繞射測量中,拉伸時在長度達到原來的4倍時開始觀察到表示形成了晶體層的亮點,收縮時在長度恢復到原來的3倍之前均能觀察到亮點。以上結果表明,拉伸結晶特性是可逆反應,要想維持晶體層,需要在紅線範圍内使用。
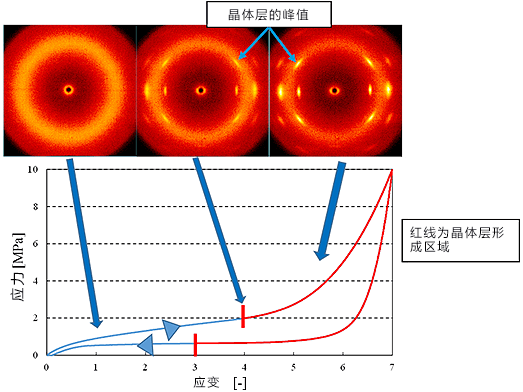
圖4:利用廣角X射線測量晶體層
研究團隊根據這個結果控制了人工肌肉,使橡膠始終保持一定程度以上的拉伸狀態,從而維持橡膠的晶體層。以前在伸縮次數達到幾百至幾千次後就會斷裂,而利用此次開發的人工肌肉控制方法,可以伸縮80萬次以上,達成了本次研究主題的目標值——20萬次(假設一分鐘約輔助2次佩戴者,1天使用5小時可使用1年左右,圖5)。
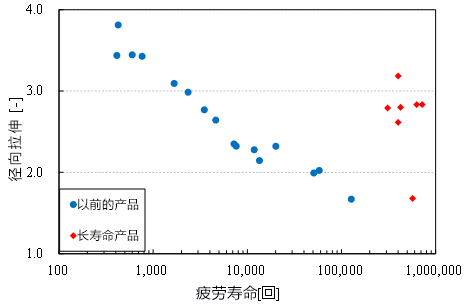
圖5:軸向纖維強化型人工肌肉的疲勞壽命
通過將此次開發的人工肌肉應用於身體佩戴式輔助設備,可獲得以下4個優點。
(1)由於重量輕,輸出功率高,驅動部的移動性較高,可實現小型化。另外,與McKibben型人工肌肉相比,可在低氣壓下獲得相同水平的輸出,壓縮機等氣動源可實現小型化。
(2)結構靈活,剛性控制可實現開環控制(無感測器回饋的控制,特點是可實現無感測器的簡單結構和控制律)。另外,與帶減速器的馬達相比,反向驅動性(致動器輸出側受到的力傳遞到輸入側的性質)優異,本質上安全性較高。
(3)人工肌肉的形狀自由度比較高,因此可應用於不同結構的設備。
(4)部件數量少,原料成本低。
文:JST客觀日本編輯部翻譯整理











