
日本國立研究開發法人新能源產業技術綜合開發機構(NEDO)和埼玉大學在興電舍公司及WACOH-TECH公司的協助下,全球首次成功開發出了採用高動態範圍(HDR)力覺感測器的組裝機器人。
此次新開發出了力檢測範圍(動態範圍)為10g至20kg重、達到原來10倍的感測器,以及能識別微小力度的人工智慧(AI)技術,通過配備這些技術,機器人可以邊調節微小的力度邊進行精密的組裝作業。
該機器人不但能控制力度組裝容易刮痕的樹脂材料等,還可以檢測提醒組裝操作已完成的咔噠聲,利用機器人的組裝作業有望實現升級。
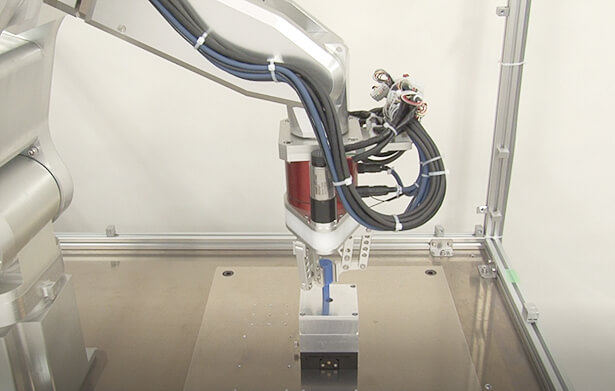
圖1:採用HDR力覺感測器的組裝機器人
1.概要
近年來,通過配備力覺感測器,在調節力度的同時實現高級組裝的機器人越來越多。不過,這些機器人存在一個嚴重的課題,即力覺感測器的檢測範圍(動態範圍)較小,無法測量微小的力,無法精確調節力度。因此,產業領域要想推進省力化,需要開發和導入採用高性能力覺感測器的組裝機器人。
為此,NEDO和國立大學法人埼玉大學為實現高級組裝動作的自動化,於2018年度啟動了利用高動態範圍(HDR)運動解析技術的組裝機器人研究開發項目。在該項目中,與WACOH-TECH公司合作開發了能大範圍檢測力(從微小的力到較大的力)的HDR力覺感測器,此次又在興電舍公司的協助下,成功開發出了採用該感測器的組裝機器人。這是全球首次開發出配備HDR力覺感測器的組裝機器人。
該機器人的力檢測範圍為原來的商用力覺感測器的10倍,可檢測從10g重到20kg重的力。由於最小能檢測原來十分之一的力,樹脂材料等容易刮痕的對象物也可以控制力度進行組裝。另外,利用可基於精確的力資訊進行機器學習的人工智慧(AI)技術能準確識別組裝狀態,可實現更高級的組裝作業。例如,組裝結束時會進行振動,進行會發出表示安裝成功的咔噠聲的組裝作業時,通過利用力檢測振動,機器人能更準確識別出組裝成功,提高作業的可靠性。由此,除了利用以往的機器人力覺感測器能完成的作業外,還可以擴大機器人的應用範圍,完成需要精確調節力度的作業。
2.成果
【1】通過動態範圍為原來10倍的力覺感測器和機器人實現精確的力覺檢測
此次開發的HDR感測器通過採用結合不同範圍應變發生體的獨特多級結構,與以往的商用感測器相比,實現了10倍的動態範圍,能檢測10g至20kg重的力。配備該感測器的機器人具備非常靈敏的力覺,即使利用像羽毛一樣輕的物體觸碰機器人也能檢測到。雖然機器人重達30kg,但用一支羽毛就能操作。
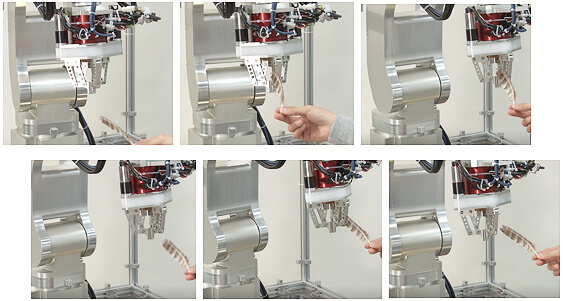
圖2:隨著羽毛觸碰產生的力(重約10g)移動
【2】利用精確的力覺實現組裝
利用上述【1】的技術實現了組裝動作。在插軸入孔作業中,以前很難組裝塑料等容易刮痕的材料,但此次由於最小能檢測到原來十分之一的力,能以不會傷害材料的微小力度接觸並進行組裝。
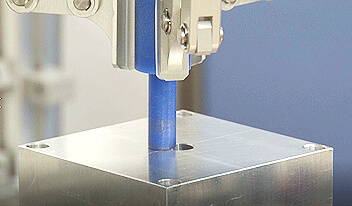
圖3:樹脂材料的組裝作業
【3】利用識別微小力覺的AI技術提高組裝作業的可靠性
在對機器人精度要求比較高的蓋子組裝等高級組裝作業中,為提高成功率,需要識別作業是否成功,並通過在失敗時重新作業來提高成功率。因此,此次開發了利用力覺檢測技術檢測表示作業成功的咔噠聲,用以判斷作業是否成功的人工智慧(AI)技術。利用AI的深度學習功能,組裝作業失敗時可微調動作重新作業,由此能大幅提高高級組裝動作的可靠性。
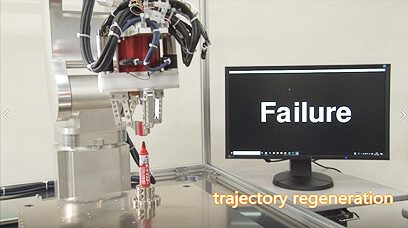
圖4:作業失敗後重新作業的機器人
【4】利用自動調整機器人剛性的AI技術實現高級組裝作業
眾所周知,人類通過調節身體的剛度來精確調節力的大小。研究團隊此次根據這一點,開發了通過強化學習來自動學習適合組裝作業的機器人剛度的AI技術,並配備於機器人。通過從過去的動作中學習,即使是高級組裝動作,也能精確而迅速地調節力度。
文:JST客觀日本編輯部翻譯整理











