
東京工業大學的隻野耕太郎副教授與工學院的博士生Solmon Jeong開發了既能提高手術精度又可以減輕術者負擔的新型手術支援機器人系統。
手術支援機器人一般為主從式,即術者通過移動自己手中的主操作手,來操縱插入患者體內的從操作手。主從式手術支援機器人的手中操作分為用拇指和食指捏住主操作手的捏握式和用整個手掌握住主操作手的抓握式。捏握式適合精細的作業,但術者的負擔大。抓握式雖在完成精細作業方面不如捏握式,但術者的負擔小。為此,研究團隊新開發了通過結合捏握和抓握兩種動作,既能完成精細作業,又可以減輕術者負擔的主操作手。
為實現捏握和抓握的「組合式握持」設計,研究團隊首先試製了用拇指和食指的指尖捏住鑷子狀部分,用其餘手指和整個手掌握住抓握部分進行操作的驗證模型(圖1)。研究團隊共製作了4種驗證模型,包括指尖方向及用手掌握持的握柄距離和角度可以調節的類型,以及固定的類型,並調查了打結花費的時間和所需的動作。調查發現,具備可變機構的模型與固定類型相比,執行任務所需的時間和動作都比較少。
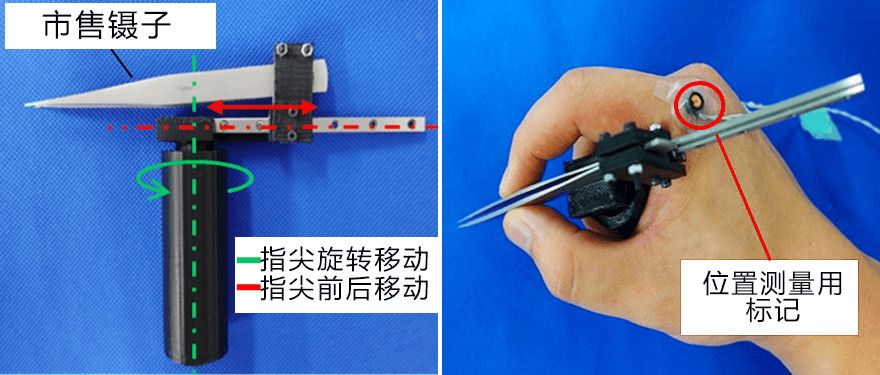
圖1:結合捏握和抓握的驗證模型
研究團隊以利用驗證模型獲得的初步結果為基礎,結合捏握和抓握,開發了可調節指尖和抓握部角度及距離的握持器件(圖2、3)。這種握持器件在距離抓握部30~50mm的範圍内,無需移動腕部即可前後左右移動指尖。
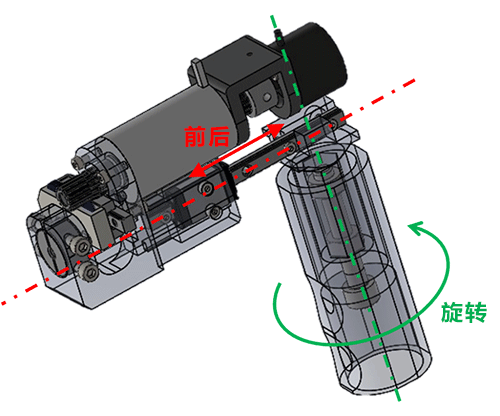
圖2:本次研究開發的結合捏握和抓握的握持器件
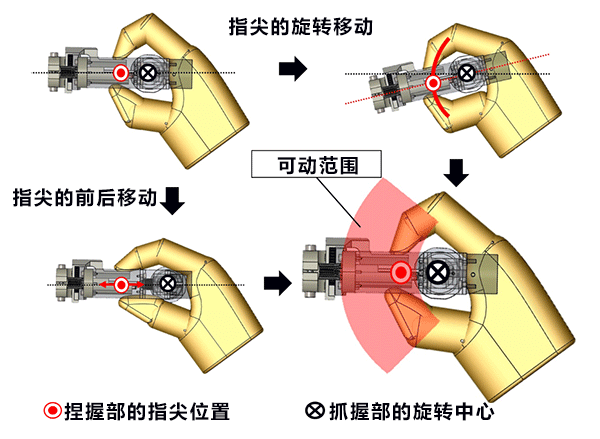
圖3:新開發的握持器件的平面圖。在距離握持部分30~50mm的範圍内,無需移動腕部即可移動指尖。
在實際的外科手術中,高精度定位非常重要。研究團隊分別利用新開發的組合式握柄主操作手和以往的抓握式及捏握式主操作手實施了指向實驗,比較了位置控制操作性能。另外,還研究了將主操作手的動作縮小轉換為從操作手動作的比例因子對從操作手位置控制的影響。
結果顯示,在失敗頻率、所需時間和手的移動距離等操作性方面,抓握式在比例因子較大時,捏握式在比例因子較小時操作性相對更出色,而新開發的組合式在這兩種情況下均表現出了優異的性能。
論文資訊
題目:Manipulation of a master manipulator with a combined-grip-handle of pinch and power grips
期刊:《The International Journal of Medical Robotics and Computer Assisted Surgery》
DOI:10.1002/rcs.2065
文:JST客觀日本編輯部編譯











