1. 日本在足式機器人領域的發展和成就
人形機器人是機器人學的終極目標,不僅因為大家期望其形態可以近似於人類的情結所致,更是由於人形機器人可以與人類日常生活得環境以及基礎設施構造完美銜接。自1970年世界第一臺雙足步行機器人由早稻田大學研製成功以來,日本在人形機器人的機械結構與運動控制方面的研究一直引領全球。近20年來,日本相繼推出了ASIMO,HRP, T-HR3等多款受世人矚目的人形機器人。

由日本產總研(AIST)聯合川田工業共同開發的HRP人形機器人系列
此外,日本在四足機器人的研發同樣發展迅速。以廣瀨茂男教授為代表的仿生機器人專家在四足機器人的機械設計與運動控制方面取得了多項先驅性的研究進展。自上世紀90年代末開始,日本的科技企業也開始在四足機器人商業化方面進行探索。例如,索尼公司面向家庭消費市場推出的四足機器人Aibo至今仍不斷地進行產品的疊代改良。

廣瀨茂男教授製作的四足機器人(左)與索尼研發的Aibo機器狗(右)
2.液壓驅動使得足式機器人運動性能實現突出
雖然日本各大企業及學術機構在足式機器人的研發上一直投入巨大,但足式機器人受電機驅動的性能制約也導致日本企業近年在足式機器人的突破進展有所減少。以多達24個以上的自由度的足式機器人為例,分佈於其下肢各個關節處龐大的電機驅動器不但很難提供特定任務下所需的瞬時輸出,反而在重量方面增加了不少負擔。因此,再先進的演算法也需要強大的驅動機構作為動力支撐。驅動機構的性能很大程度上決定了機器人運動性能的高低,這種差異在足式機器人上體現的格外明顯。

在MIT時期的波士頓動力創始人Marc Raibert
由MIT等世界頂級足式機器人教授創立於1992年的波士頓動力公司,早早便開始探索如何在足式機器人的運動性能方面突破瓶頸,並很快以液壓驅動作為切入點,專注於液壓驅動的足式機器人方面的研發。在同等情況下用液壓驅動可以提供更加強大的輸出功率。例如,波士頓動力公司研發的液壓人形機器人Atlas可以實現空翻等高難度動作的背後,正是因為有強大的液壓動力作為支撐。波士頓動力公司很快便將液壓驅動的方案與控制穩定性更高的四足機器人大狗相結合。並在2010年至2013年這8年間,為美國軍方推出了液壓四足機器人BigDog。
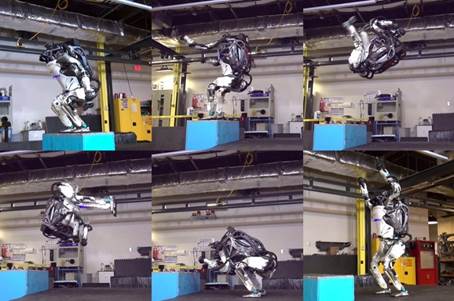
波士頓動力研發的雙足液壓機器人Atlas實現後空翻動作
3.無電刷的電機加速四足機器人產品化進程
然而液壓驅動的四足機器人需要裝載體積很大的液壓缸才能支持運行,並且液壓驅動器的高額成本以及液壓的引擎的高噪音都阻礙著液壓驅動四足機器人的商業化進展。因此,四足機器人的專家教授們再次將目光迴歸到電機驅動方向上,世界上一流的足式機器人實驗室開始嘗試自主研發機器人電機與驅動機構。
終於在2012年,美國MIT的Sangbae Kim教授的研究團隊率先實現了内轉子無電刷的電機,隨後又推出了基於該電機的四足機器人Cheetah2,並實現了最快秒速6.4m的奔跑速度。
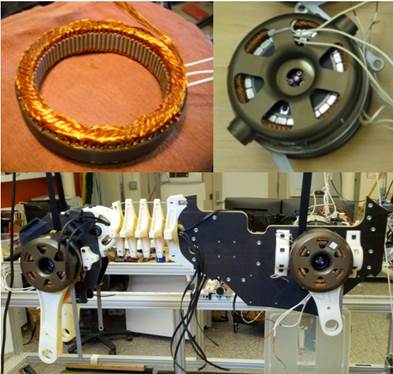
MIT Cheetah所採用的内轉子無電刷的電機與驅動關節
波士頓動力公司也緊隨其後在2016年發布了基於無電刷的電機驅動的Spot Mini,並且快速實現量產。同時,波士頓動力公司最後一次官方發布液壓驅動的Atlas影片是2018年。再之後其官方發布的所有新聞及影片都是圍繞電機驅動的Spot mini這款產品而開展的。這些現象足以說明,無電刷的電機驅動已經是各大四足機器人廠家在產品商業化過程中的共識。
4.四足機器人在日本探索行業應用的挑戰
2017年7月,日本軟銀集團從谷歌公司手上成功收購波士頓動力的新聞,引發了機器人界的廣泛關注。自從被軟銀集團收購以來,波士頓動力公司一改過去專注於做前緣研究的風格,快速向產品商業化落地方向轉型。而日本成為了波士頓動力四足機器人探索商業化的主要」試驗田」。
例如,日本軟銀在收購了波士頓動力公司以後,在日本鹿島建設與竹中工務店等數家建築場景中導入Spot mini進行了2年左右的現場巡檢相關的作業。近年,日本的建築業是受勞動力短缺影響最為嚴重的行業之一,並且即將出臺的建築行業勞動法案對工作時長進行了嚴格的限制,都將」倒逼」企業導入機器人。

Spot mini機器人在日本建築現場進行巡檢
同時,四足機器人相比輪式機器人及無人航空載具最大的優勢在於應對複雜地面的運動性能。尤其是日本多山多隧道的地理特點,使得足式機器人應對不平整地形的優勢會大為凸顯出來。在地面環境偵察等應用方面,相比於傳統的檢測無人航空載具,足式機器人擁有續航能力更強,及更易收集地面環境信息等明顯優點。
然而,目前多數足式機器人已經實際落地的情況還無法實現自動化。尤其是在爬樓梯,跨越障礙物等對感知精度與運動規畫即時性要求很高的場景還需要人工遠程操作的輔助。並且,不少日本勞動力短缺」重災區」的企業對四足機器人這一全新的機器人平台持觀望態度。企業方面對於如何利用四足機器人解決企業當前的勞動力短缺的問題,存在不知如何開展研發工作的顧慮。因此,四足機器人距離真實的商業化落地還面臨諸多課題與挑戰。
5.未來1-2年四足機器人將進入快速發展期
從2019-2020年四足機器人的行業發展我們不難預見未來1-2年將可能是足式機器人商業化落地將進入快速發展期,並很有可能出現從量變到質變的產品。同時,市場與消費者定位將會逐漸細分化。

波士頓動力Spot Mini在東京羽田空港進行測試
以波士頓動力,Anyrobotics為代表的歐美頂級四足機器人廠家將更加註重於推出針對建築行業,危險環境作業等特定場景的高端解決方案。
於此同時,中國新興的四足機器人企業將更加專注於打造更具性價比的消費級四足機器人,加速四足機器人產品的普及化。

逐漸開源化的四足機器人
以斯坦福大學,紐約大學為代表的研究機構也相繼推出等開源四足機器人平台pupper,solo等。同時四足機器人相關的核心零件如電機,激光達,單片機電腦等也相繼低價化。
並且日本當前勞動力短缺的社會問題為四足機器人行業應用的探索提供了有利的條件,期待四足機器人可以得到快速的發展。
文:王宇清,餘錦澤
編輯修改:JST客觀日本編輯部











