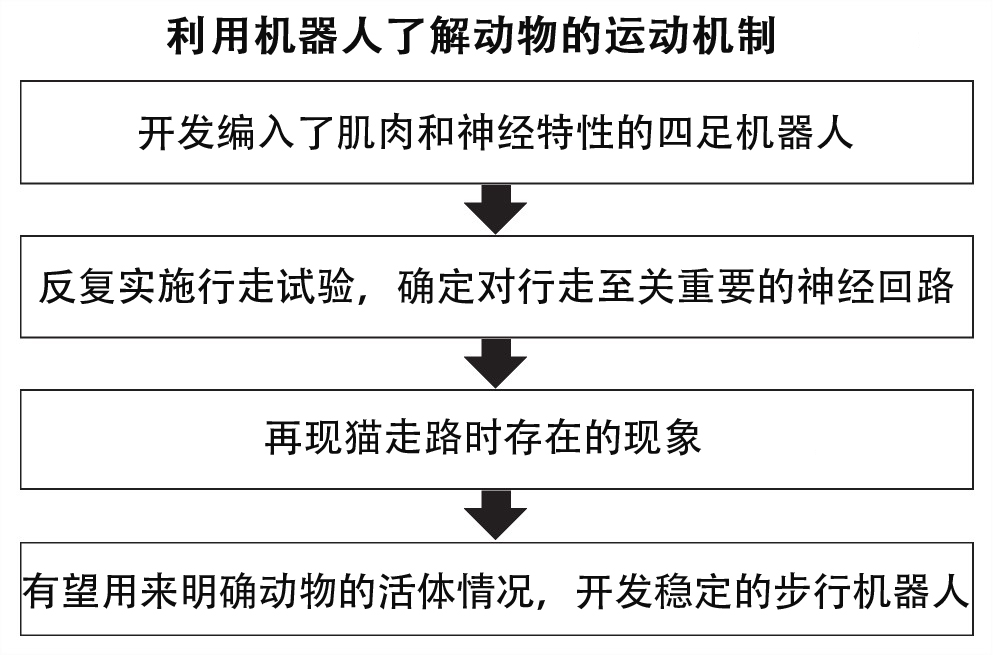
日本大阪大學的增田容一助教等人組成的研究團隊開發出了可以編入動物的神經和肌肉特性從而移動行走的機器人。研究團隊發現了控制貓行走的重要神經廻路,再現了貓的穩定行走。通過用機器人再現運動,有助於查清動物活體的情況,還有助於結合動物的身體機制,開發靈活、穩定的步行機器人等。
研究團隊為調查動物的行走情況,開發了模擬動物的四足機器人。機器人利用馬達和電路在每條腿上分別再現了控制腰部和膝蓋移動的4塊肌肉。通過用計算機設置每塊肌肉和每條神經的動作及連接等,使機器人移動。
為了利用新開發的機器人發現實現穩定步態的神經廻路,研究團隊反複試驗,不斷改變肌肉與神經的連接,讓機器人行走。
結果發現,隻需在每條腿上再現簡單的神經廻路(使腰部及膝蓋伸展和收縮的肌肉聯動的神經廻路),就可以穩定行走。當機器人在沒有此次發現的神經廻路的狀態下行走時,其行走節奏就會變得不規則。
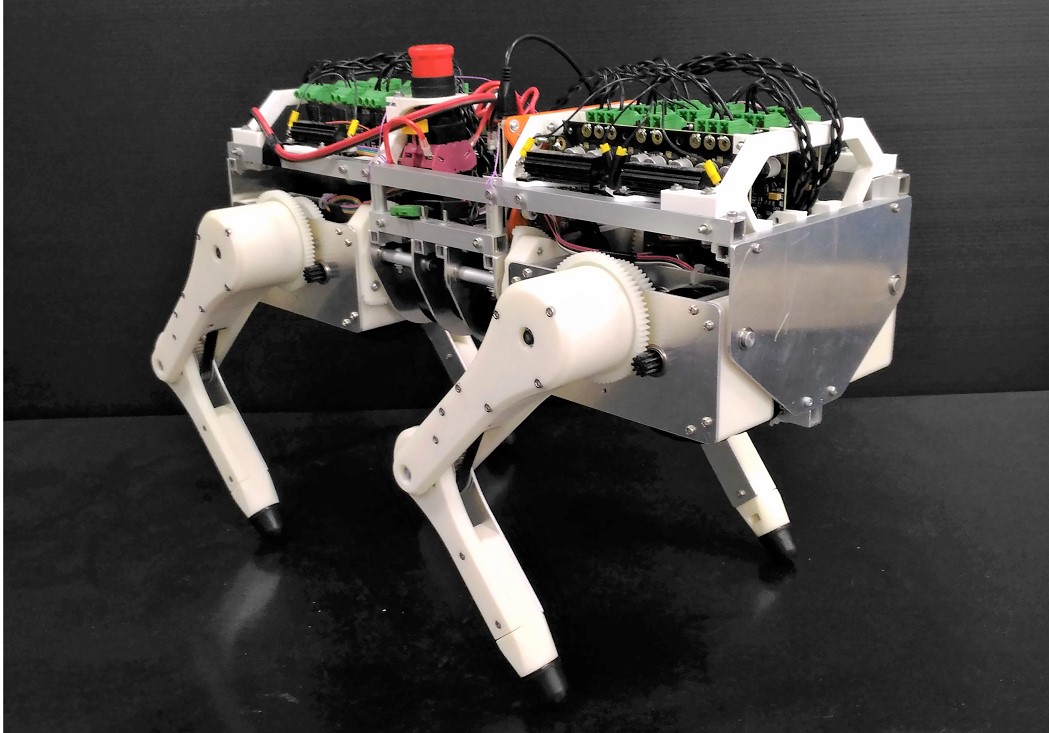
新開發的四足機器人可以編入動物的神經和肌肉特性(圖片由大阪大學增田助教提供)
眾所周知,向正在行走的貓的腿部施加電刺激,貓會站在地上無法邁出下一步。對於嵌入了研究團隊發現的神經廻路的機器人,在相同的條件給予刺激,也出現了同樣的現象。
近年來,研究人員逐漸發現,動物的行走運動不是由大腦和脊髓中複雜的神經廻路產生的,而只是由簡單的反射性神經廻路產生。關於貓行走的研究在20世紀後半期取得了進展,但現在因愛護動物等原因,動物實驗受到了嚴格的管理和限制,利用動物活體調查行走機制變得困難。
為此,用機器人取代實驗動物來了解動物的方法受到了關注。增田助教介紹說:「原因在於機器人的性能得到提高,可以再現生物體的動作,而且機器人的成本降低,更容易在實驗中使用。」
目前普通的四足機器人大多是在掌握自己的身體和周圍情況的同時,快速計算下一步的行動來實現移動的。通過獲取動物的運動機制,可以實現高效和靈活移動的機器人。
增田助教表示:「通過瞭解動物的動作,將來機器人可以獲得符合自然和物理可用能規律的運動能力。」
日文:張耀宇、日經產業新聞,2021/05/17
中文:JST客觀日本編輯部











