近日,日本藤田醫科大學進行了一項遠程操作手術輔助機器人的實驗。在東京都港區和相距約300公里外的愛知縣豐明市之間,由東京的經驗豐富的醫生一邊指導愛知的年輕醫生一邊進行操作。實驗使用網路專屬線,減少了影片共享的延遲,確認實際應用也無問題。藤田醫科大學還公開了最早在2024年構建連接日本和海外的通信網路,以進行遠程手術的計劃。
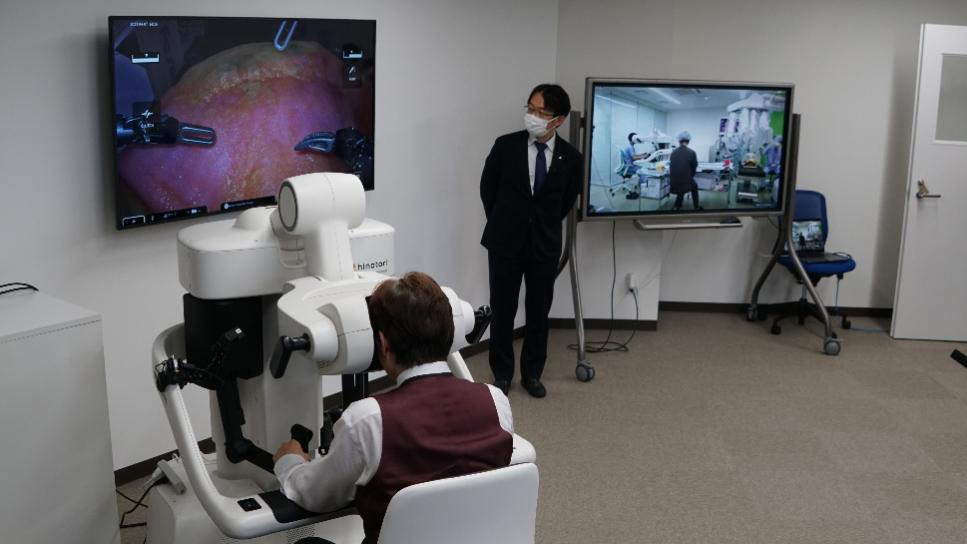
東京經驗豐富的醫生(左前)指導位於愛知的年輕醫生(右方屏幕中)進行機器人手術
該試驗在4月7號由與藤田醫科大學合作開發手術輔助機器人的希森美康(SYSMEX)株式會社、川崎重工業株式會社、以及希森美康出資的企業Medicaroid株式會社聯合實施。
實驗中,將位於東京都港區的希森美康和位於愛知縣豐明市的藤田醫科大學通過專屬線相連,愛知縣的年輕醫生在東京經驗豐富的醫生的指導下,使用手術專用的模擬臟器進行了機器人手術。
手術輔助機器人的機器手臂代替醫生的手臂進行手術,由醫生通過雙手和雙腳操作位於他處的、名為外科醫生操作艙(surgeon cockpit)的裝置。
外科醫生操作艙通常被放置在機械臂及患者所在的同一手術室内,但如果相隔較遠,也可用於遠程手術。在遠程指導實驗中,東京和愛知的醫生坐在各自房間的操作艙内。兩名醫生通過共享從安裝在位於愛知的機器手臂前端的攝像機拍攝的模擬臟器影片,交替進行操作。
本次實驗,確認了不存在向遠距離外的醫生傳送手術現場影片出現延遲以及通信速度波動等問題。通常手術允許的延遲為100毫秒以内,此次僅延遲了37毫秒。
藤田醫科大學教授宇山一朗表示,「我沒有感覺到任何延遲,甚至分不出是在(機器手臂)旁邊操作還是遠程操作。」
日文:茂野新太、《日經產業新聞》、2023/4/19
中文:JST客觀日本編輯部











