
像蜈蚣一樣多腿移動的「多足機器人」具有出色的耐故障性和防跌倒性能,有望在行星探索和災害救援等人類難以進入的場所發揮作用。然而,控制與環境進行複雜交互作用的腿部較為困難,尤其是在行走時,需要多腿接觸地面抵抗重力來支撐體重,要做出急轉彎等敏捷運動更是困難的事情。
通常情況下,雖然在機器人控制上應排除不穩定性,但實際生物在進行運動控制時往往在積極利用不穩定性。大阪大學研究生院基礎工學研究科的青井伸也教授的研究團隊認為,可以將多足機器人的不穩定性快速轉移成其他運動的驅動力。
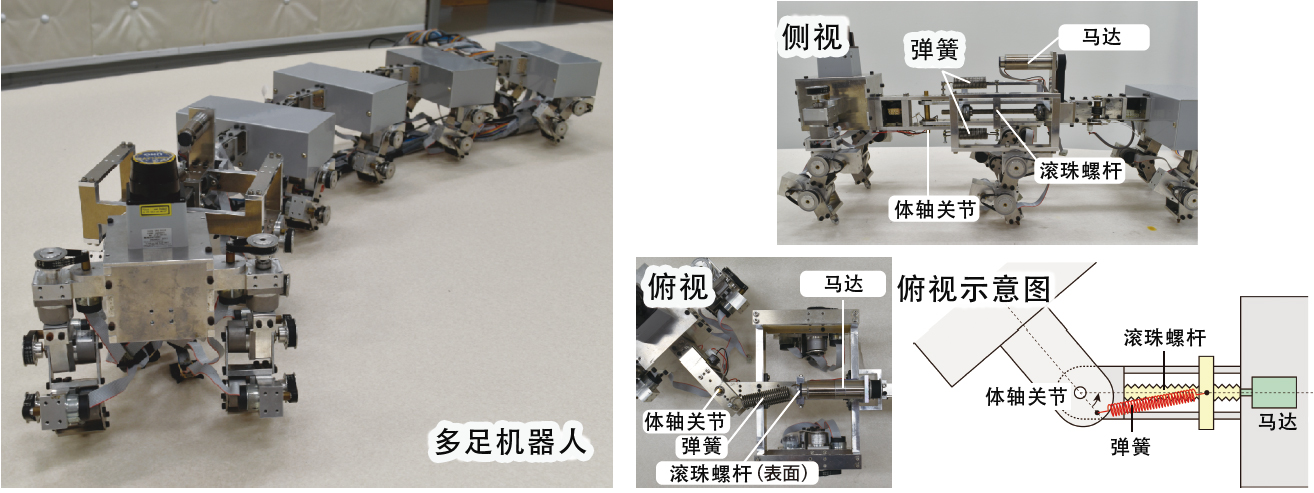
研究團隊此前已經證明,通過對裝有旋轉彈簧、擁有柔性軸的多足機器人,利用以彈簧剛性為參數的「叉型分岔」使直線行走變得不穩定,轉變為半徑依賴彈簧剛性的圓弧路徑行走方式。把這種不穩定性作為驅動力,通過改變異體軸的旋轉彈簧的剛性,開發出了能夠自如引發直線行走不穩定性的新機構。並且通過進一步控制轉變而來的曲線行走半徑使機器人到達目的地,成功實現了靈活且高效的多足機器人行走。
本次研究成果利用力學特性實現了簡單的控制,有望讓機器人代替人類在多種場所和場景中發揮作用。此外,該成果還有助於理解生物的運動機制,有望用於人工物體的開發等領域。
TEXT:橫井Manami
原文:JSTnews 2023年8月號
翻譯:JST客觀日本編輯部











