
東京大學研究生院資訊理工學系研究科智慧機械資訊學專業的竹内昌治教授(機械工學)等成功開發出一款通過骨骼肌組織的收縮進行運動的雙足行走機器人。這在世界上尚屬首次。該機器人能夠進行籃球比賽中常見的以軸心腳為支點旋轉的「陀螺轉身」,並可以以機器人尺寸二分之一的旋轉半徑轉換方向。研究人員表示,這一成果將有助於開發以肌肉組織為驅動源的機器人,並促進對人類行走機制的理解。
融合生物來源材料和機械部件製成的機器人被稱為「生物混合機器人」。以肌肉組織作為機器人驅動源的相關研究正在不斷取得進展,海外已經發布了諸如毛蟲一樣爬行或像魚一樣用鰭游泳的機器人,但由於這類機器人無法在轉向時停止前進,實現小範圍轉彎非常困難。
作為仿人機器人研究的一部分,竹内教授等計劃製作一種能夠實現精細旋轉動作的生物混合雙足行走機器人。他們在由3D列印機製作的塑料上安裝了有機硅類材質的柔軟基底層和培養的骨骼肌組織。通過電刺激使肌肉組織收縮,機器人的腳就會彎曲,從而實現兩足行走。通過將一隻腳固定為軸心腳,僅對另一隻驅動腳施加電刺激,即可實現旋轉。
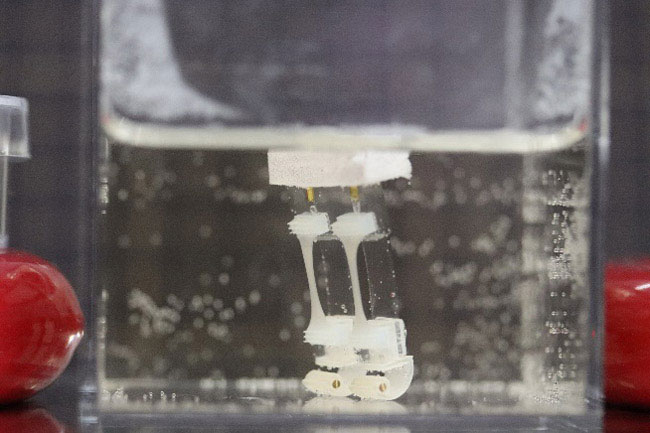
雙足行走機器人。腳長約2cm,寬約1cm。在培養液中使用浮子和重物保持直立姿勢。透明柔軟的基底層前方,看起來被拉伸成白色的肌肉組織即為驅動源。(供圖:東京大學教授竹内昌治)
關於轉換方向的小範圍轉彎,以往的無法停止前進的機器人的「旋轉率」,即機器人長度與轉彎半徑之比為0.4,需要沿著機器人尺寸更大的圓形來轉換方向。然而,這款雙足行走機器人的旋轉率為2.1,相對於並攏後寬約1cm的兩隻腳,可以沿著半徑5mm左右的圓形來轉換方向。
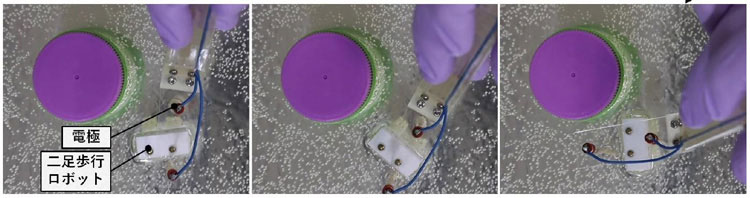
雙足機器人的旋轉運動。從上方觀察可見,從左至右的照片中,機器人大約向右轉轉了90度(供圖:東京大學教授竹内昌治)
關於今後的發展,竹内教授表示:「肌肉的輸出功率與其截面積成正比,因此要產生更大的力量就需要更粗的肌肉,但目前將養分輸送到肌肉内部的技術等尚未確立。我們希望結合研究室正在進行的培養厚肉的知識,來改進雙足行走機器人。」
該研究與早稻田大學合作進行,並於2024年1月26日刊登在美國科學雜誌《Matter》的電子版上,預計將成為3月號的封面。
【相關鏈結】
• 東京大學新聞稿 世界首例!肌肉驅動的雙足行走機器人
• 東京大學竹内昌治研究室的X(前Twitter)賬號
【論文資訊】
雜誌:Matter,
論文:Biohybrid bipedal robot powered by skeletal muscle tissue
DOI:10.1016/j.matt.2023.12.035
原文:JST Science Portal 編輯部
中文:JST客觀日本編輯部











