
機器人與人類統合工作,從事家務、待客、醫療、養老等多種工作。這種猶如小說和電影中描繪的世界正在逐步成為現實。早稻田大學理工學術院的菅野重樹教授領導的研究團隊正在開展以「通過AI和機器人的共同進步,2050年之前實現能夠自主學習和行動,並與人類共存的機器人」為目標的項目。本文請菅野教授介紹了用一臺機器人執行多種任務的「智慧機器人」的開發現狀和未來前景。

對標《鐵臂阿童木》中的未來世界
40多年來持續不斷研究
手冢治虫的代表作《鐵臂阿童木》中描繪的「機器人與人類和諧共處的社會」,想必每個人都曾幻想過那樣的未來世界吧。機器人能夠與人交流,還能夠擔負家務和待客等各種任務。特別是在因少子老齡化導致勞動人口減少,導致人才短缺的福祉和醫療領域,人們對能夠與人類一起行動並對人類提供協助的機器人應用前景寄予厚望。
然而,縱觀目前的機器人,可以發現儘管機器人在汽車等製造現場的自動化、前臺接待和商場樓層引導,以及餐廳送餐服務等特定任務的執行方面已經取得了長足的進步,但一臺機器人無法執行多項不同任務也是實情。此外,機器人要真正做到「與人類接觸」,不僅在材料方面,在觸碰到人時的力度等動作方面也要求「柔軟」和「細微」。
致力於解決上述課題,目標在2050年之前創造出能夠自主執行從商務到家務、護理、看護和治療機器人的是早稻田大學理工學術院的菅野重樹教授。菅野教授介紹,他是在1973年看到世界上第一個可以站立行走的人形機器人「WABOT-1」 開發成功的新聞後,開始立志從事機器人研究的。WABOT-1是由被稱為日本機器人研究之父的已故加藤一郎教授當年在早稻田大學任職期間開發出來的。菅野教授回顧道,「我就是決心要在研究仿人機器人的加藤老師的指導下學習,才報考了早稻田大學。成功考取早大後,我便加入了加藤老師的研究室,願望得以實現」。
進入早稻田大學研究生院的菅野先生在加藤教授的指導下,加入了曾在國際科學技術博覽會上展出的鍵盤樂器演奏機器人「WABOT-2」的開發團隊。此後,接連開發出了世界上首款配備能打雞蛋的機械手的機器人「WENDY」;具備原始智慧和情感的機器人「WAMOEBA」;以及2007年推出的人類共存機器人「TWENDY-ONE」(圖1)等多款機器人。40多年來,菅野教授一直在致力於實現可與人類互動的機器人領域的研究。
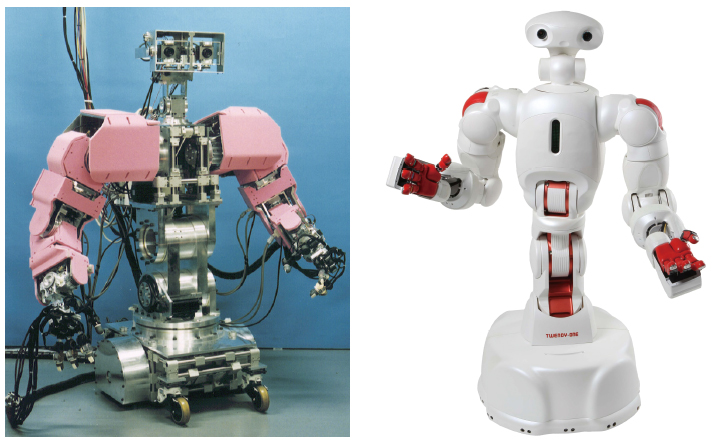
圖1 菅野先生開發的機器人。
WENDY是世界上第一個通過在各個腕部關節增加被動柔性,可以漂亮地完成打雞蛋動作的機器人(左)。隨後開發的TWENDY-ONE,通過被動柔性實現了伴隨人和適應環境的功能,並加強了可以支撐人體的力量,設想應用於家務及護理用途(右)。
一臺機器人配備多種功能
關鍵在於溝通能力
菅野先生作為日本科學技術振興機構(JST)登月型研究開發事業目標3「一人一臺終生伴隨智慧機器人」項目的負責人,目前正致力於開發新型機器人。該項目的理念是通過創造源於日本的顛覆性創新,解決日本面臨的少子老齡化、全球變暖和大規模災害等各種問題,在大膽設想的基礎上開展具有挑戰性的研究和開發。項目在「社會」、「環境」和「經濟」三個領域設定了醫療、環境、AI、機器人等9個目標。
項目的最終目標是創造出能夠在各種場合自主動作,在伴隨人的同時執行多項任務的機器人。例如,福利和護理領域有各種各樣的自動化工具,可以將每種功能都機器人化。「但是,這種方法將導致機器人的數量大幅增加」,菅野先生在談到機器人社會時指出了上述問題。
目前,菅野先生正在開發一款名為「AIREC(AI-driven Robot for Embrace and Care)」的機器人。這款機器人可以稱得上是和智慧型手機一樣的,一臺設備中包含多種功能的「智慧機器人」。菅野先生對進入21世紀以來AI和控制器取得巨大發展的現狀持積極看法,他表示「相信通過將現有技術與新開發的硬體相結合,將能夠開發出前所未有的機器人。我們項目的目標是打造一個全新的機器人世界,而不僅僅是現有機器人的升級」。
為實現智慧機器人,菅野先生正致力於開發利用AI實現高度適應環境的柔性機器人技術,以及可在包括人類在内的現實空間中,具有可靈活驅動機器人軀體的運動智慧以及擁有相互溝通智慧的機器人。此外,作為實施體制,每個研發項目都制定了以下目標:①構建智慧機器人的軀體和控制系統;②構建智慧機器人的智慧系統;③開發智慧機器人在福祉和醫療領域的應用技術;④制定智慧機器人的實際應用方案(圖2)。
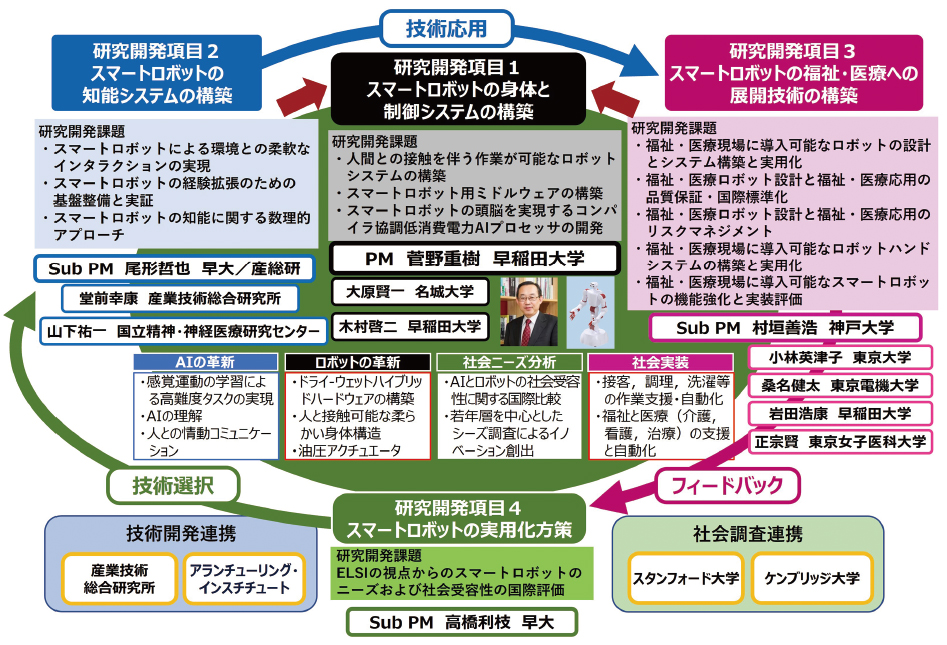
圖2 「一人一臺終生伴隨智慧機器人」項目框架
從「硬/重」到「柔軟」
安全且具有自我修復能力
實現智慧機器人的目標之一就是將傳統的又「硬」又「重」的機器人演化為安全「柔軟」的機器人。目前的機器人出於耐用性等考慮,表面和内部控制機構多使用金屬和強化塑料,但堅硬的機器人在與人密切接觸時可能會導致危險的發生。此外,為了讓機器人與人互動,能夠根據情況調節機器人力度的大小也很重要。實現此類柔性機器人的舉措之一就是開發模仿人體的新型「乾溼混合智慧機器人」(圖3)。
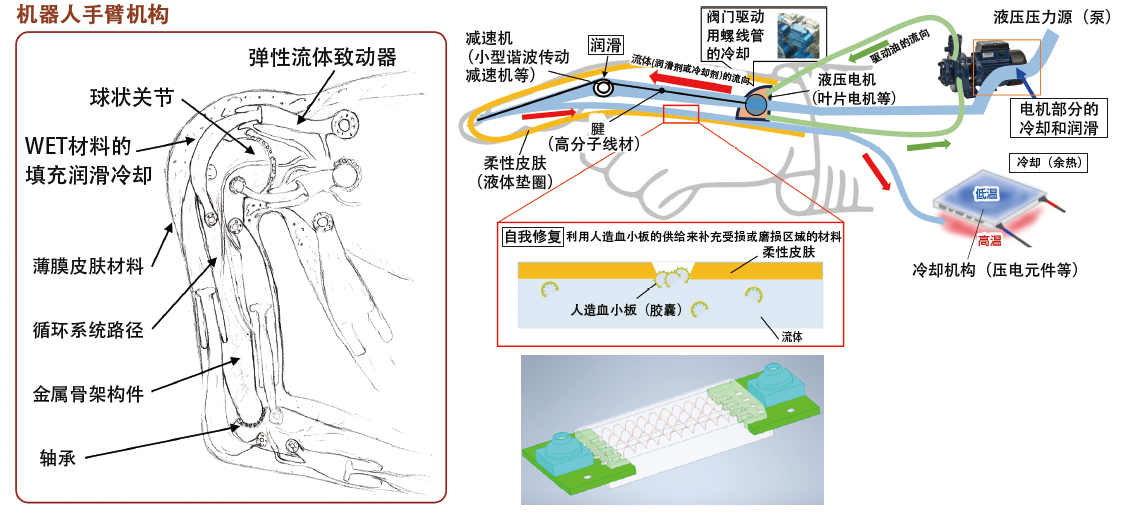
圖3 乾溼混合智慧機器人的開發。
通過骨骼和關節材料的選取和結構的設計,創造出各連接裝具之間沒有空隙的安全機器人(左)。最近,將動能轉化為機器人手部運動的磁粘彈性流體葉片電機致動器與用於冷卻和自我修復目的循環系統結合起來的嘗試(右上),為提高可靠性和伸縮時能夠穩定輸出的皮膚感測器(右下)都在推進之中。
乾式是指與傳統機器人一樣,身體和内部控制機構由硬質材料製成的機器人。相對而言,溼式是指使用的是具有人類和動物等生物體的「柔性」材料。柔性是通過將表皮、關節和肌肉等機器人的機構轉化為化學和流體系統來實現的。此外,柔性的特徵是通過在全身循環油劑、冷卻劑和潤滑劑等體液,具有與人類和動物類似的「自我修復功能」。
結合了乾式和溼式的長處,即兼具傳統機器和生物優勢的機器人就是乾溼混合智慧機器人。例如,與人體骨骼相對應的構件由金屬材料製成時,即使受到強烈衝擊,也幾乎不會斷裂。菅野先生解釋說:「另一方面,由於擁有與生物體相似的循環系統,因此即使發生故障,也可以通過自己提供修復材料進行自我修復」。為了實現這種機器人,目前研發團隊正在推進機械手的製動器採用導入磁粘彈性流體的液壓電機,以及自我修復用膠囊等關鍵技術的開發。(未完待續) (TEXT:佐宗秀海、PHOTO:伊藤彰浩)
原文:JSTnews 2024年3月號
翻譯:JST客觀日本編輯部











