信州大學纖維學部機械與機器人學科的照月大悟副教授與千葉大學研究生院工學研究院的中田敏是副教授、千葉大學研究生院融合理工學府的福井千海(博士研究生)等組成的研究團隊於2月19日發表研究成果稱,開發出了一種將活體蠶蛾觸角用作氣味傳感器的生物混合無人機,並創下了小型無人機搜尋氣味源的世界紀錄。通過模仿昆蟲資訊素搜尋行為,大幅提升了氣味追蹤的精度和範圍。從而實現了小型無人機氣味源探索最大5米範圍的世界紀錄。該研究成果有望為災害現場的被困人員搜救技術提供新的突破。研究成果已發表在國際學術期刊《npj Robotics》的2月5日刊上。
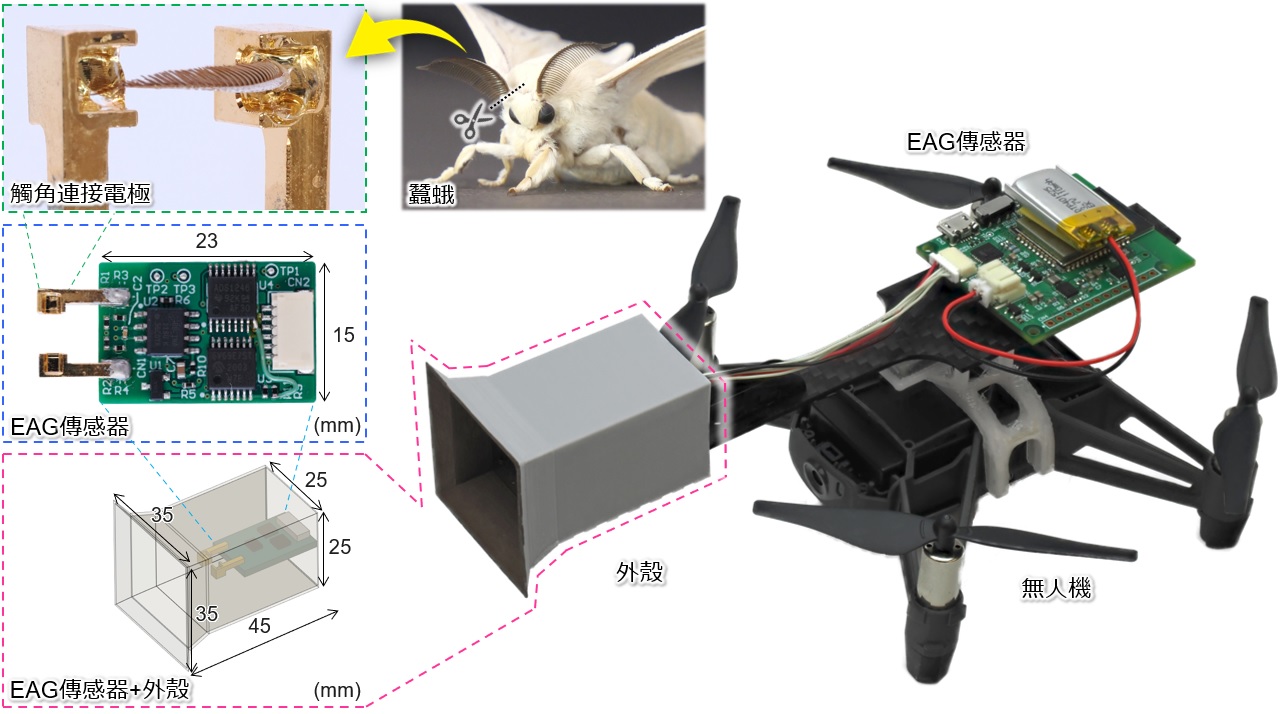
圖1 新一代生物混合無人機與構成要素(供圖:信州大學照月大悟副教授)
昆蟲擁有出色的嗅覺,例如,雄性蠶蛾會藉助空氣中飄散的雌性蠶蛾的資訊素,通過「氣味源搜尋行為」找到數公里外的雌性蠶蛾。
如果能將昆蟲的這種出色能力應用於搜救災害現場受困人員以及檢測危險質等方面,有望實現更有效的探查和檢測。
照月副教授等在2021年開發出了搭載活體蠶蛾觸角氣味傳感器的生物混合無人機,並成功實現通過識別氣味濃度和方向抵達氣味源。但當時機型的搜尋範圍僅限於2米。
此次研究團隊以搜救災害現場的受困人員為目標,設法提高了氣味追蹤能力。
一般來說,無人機使用多個螺旋槳飛行,會產生對稱的氣流,因此很難判斷氣味的來源方向。
因此,研究團隊將目光聚焦在了昆蟲的振翅效應上。中田副教授等已經證實,蠶蛾會通過振翅來控制含有氣味的氣流,並將其從前方引導至自身的觸角。
為了將這種能力應用於無人機,研究人員在螺旋槳前方安裝的氣味傳感器處加裝了一個可高效聚集氣味成分的外殼(封閉罩)。
改進後的無人機能夠在朝向氣味源方向左右45度的範圍內更靈敏地檢測到氣味。
此外,研究人員還注意到,昆蟲在尋找氣味時,並不是持續移動,而是會穿插停頓動作。因此,開發出了包括暫停(懸停)動作和沿直線移動一定距離(每次0.7米)的交替執行演算法。
通過這些改良使無人機能夠根據在旋轉掃描過程中獲取的傳感器數據以及無人機的角度來計算氣味資訊,從而實現推測氣味源方向並朝該方向直線飛行的動作。結合外殼的作用以及該演算法的應用,新機型的追蹤精度比舊機型提高了兩倍以上。
此外,針對用於氣味傳感器的連接著蠶蛾觸角的EAG(觸覺電圖)傳感器,研究人員大幅強化了其電路結構和電極結構。通過安裝可變型放大器,適當地放大來自觸角的信號,提高了信號處理效率,並通過溝槽電極結構的設計將傳感器壽命延長至5小時。EAG傳感器通過切取活體蠶蛾觸角連接電極,用於獲取觸角檢測到氣味時產生的電信號。
研究人員使用此次開發出的新一代生物混合無人機,以雌性蠶蛾的資訊素(合成蠶蛾醇)為氣味源,從距離5米遠的地點進行了搜尋實驗。
結果顯示,無人機成功地自主修正航向並抵達了距離5米遠的氣味源。創下了小型無人機氣味源探索的世界紀錄。研究人員還確認,使用雌性蠶蛾作為氣味源時,也能得到同樣的結果。
照月副教授表示:「目前,我們在信州大學、千葉大學、慶應大學組成的嗅覺飛行機器人聯盟框架下,受福島國際研究教育機構(F-REI)的委託進行研究。我們將繼續推進生物混合無人機的研發,未來希望不僅侷限於蠶蛾,還將採用蚊子等更擅長獲取人類相關氣味的嗅覺,開發出能夠依靠氣味追蹤受困人員的災害救援新技術,為未來救援工作開闢新方向。」
原文:《科學新聞》
翻譯:JST客觀日本編輯部
【論文資訊】
期刊:npj Robotics (Nature Portfolio)
論文:Advanced bio-hybrid drone for superior odor-source localization: high-precision and extended-range detection capabilities
DOI:10.1038/s44182-025-00020-9