長崎大學海洋未來創新機構的山本鬱夫教授等人組成的研究團隊於9月9日宣佈開發出了通過自直立式船機器人(ASV)與遙控式水下機器人(ROV)的聯動,可以在漁礁以及海面、海中和海床調查海洋垃圾的船機器人。以往調查海洋垃圾都是人工進行的,利用新開發的機器人有望實現更有效的調查。計劃在10月前後在長崎縣對馬市實施驗證試驗。
新開發的船機器人機具有出色的運動性能,可以原地轉彎,並配備水上和水下相機。水上相機可以360度旋轉,能自動拍照並將拍攝的圖像即時發送到地面上。水下相機拍攝的影片可用來建立漁礁、海面、海中和海床的3D模型。
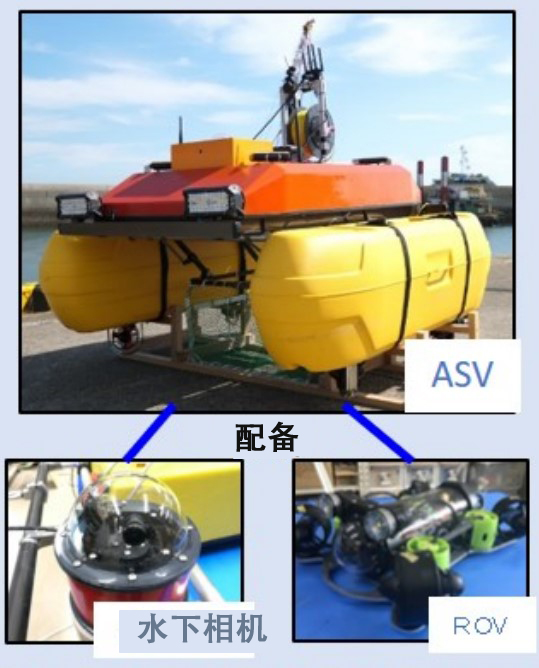
圖1:新開發的調查船機器人(圖片由長崎大學山本鬱夫教授提供)
新開發的船機器人可利用船上的纜線與能獨立航行的ROV連接。雖然可以在任何深度使用,但目前設想先對海岸線附近進行調查。除了回收微塑料,還考慮用來回收導致赤潮的有害浮游生物。
此前山本教授開發了多種機器人,包括用於基礎設施檢查為首的船機器人(KENBOT)、海洋機器人和飛行機器人。此次開發的船機器人也是以這些機器人為基礎,作為KENBOT系列開發的。
以前沒有嘗試過使用船機器人進行海洋監測,預計新開發的船機器人不僅可用於對海洋垃圾實施多方面的調查,還有助於檢查海洋構造物。
船機器人開發在國土交通省的「關於新一代海洋交通工具利用的實證項目」下進行的。
驗證試驗預定於10月份聯合對馬CAPPA、夢想科學和對馬市四方共同實施。
山本教授表示:「海洋垃圾中還有微塑料,因此從大型垃圾到微塑料,我們希望都可以利用此次開發的船機器人為解決海洋垃圾的問題做貢獻」。
原文:《科學新聞》
翻譯編輯:JST客觀日本編輯部