日本東北大學電氣通信研究所的石黑章夫教授、加納剛史副教授和安井浩太郎,與瑞士洛桑聯邦理工學院的Auke J. Ijspeert教授、加拿大渥太華大學的Emily M. Standen副教授和日本北海道大學電子科學研究所的青沼仁志副教授組成的研究團隊,著眼於蜈蚣往來於水陸之間時的「移動方式」,查清了適應環境形成「合理」運動模式的控制機制。
一般來說,動物通過靈活形成適應環境的運動模式,能在各種環境中移動。其中尤其令人感興趣的,是在陸地上協調多條腿移動,而在水中彎曲身體遊動的動作(以下稱這種動作為「水陸兩棲運動」)。充分利用身體,巧妙適應不同環境的水陸兩棲運動功能在很多動物身上都存在,比如某些種類的蜥蜴和魚等。不過,此前一直不清楚這種水陸兩棲運動是通過什麼控制機制實現的。
為搞清楚這個問題,本次研究著眼於少棘蜈蚣的水陸兩棲運動。少棘蜈蚣在陸地上協調多條腿的動作移動,而在水中則收回所有的腿,像蛇一樣鏈段運動身體遊動(圖1)。
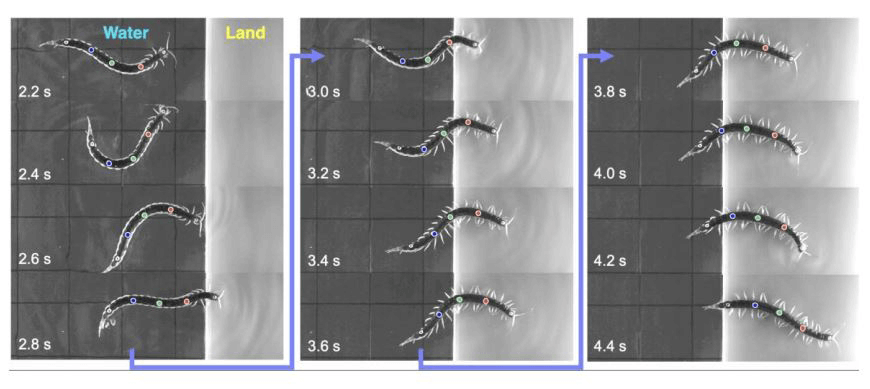
圖1:在爬行和遊動模式之間切換時。在水中(各圖片左側)收回所有腿,彎曲身體前進,隨著靠近陸地(各圖片右側),變成了協調多條腿移動。
少棘蜈蚣擁有結構相同的體節以一維狀長長連接的身體結構,便於觀察在爬行和遊動之間切換的情形。另外,部分切斷神經等侵襲性實驗也相對比較容易實施。因此可以說是非常適合調查水陸兩棲運動機制的模型生物。
研究首先觀察了少棘蜈蚣在水陸之間移動時是如何切換爬行和遊動模式的。另外,還觀察了切斷其身體中央附近的神經時,運動模式會如何變化。這些行動觀察結果表明,少棘蜈蚣擁有像傳話遊戲一樣的控制機制,即「大腦發出的運動指令會依次從頭部傳到尾部,但如果某條腿受到了來自地面的力,就會覆蓋從頭部傳達過來的指令,變更為爬行運動」(圖2)。研究團隊用算式表達了這種機制,並通過模擬成功再現了行動觀察結果。
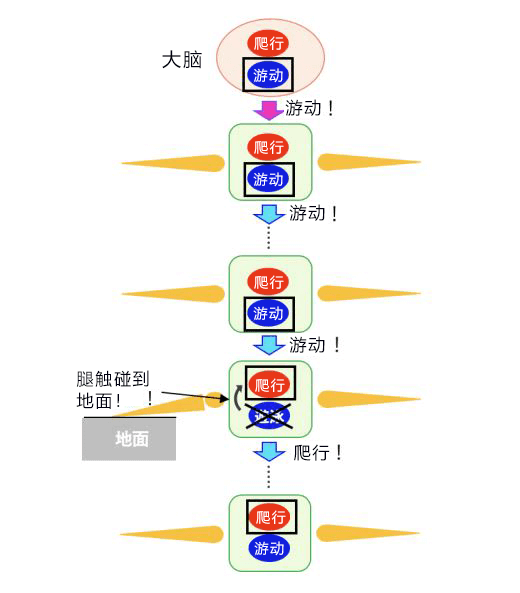
圖2:行動觀察結果表明的控制機制。身體各部位可以選擇「爬行」還是「遊動」。大腦發出「遊動」指令後,該指令便像傳話遊戲一樣從頭部傳到尾部。但如果某條腿觸碰到地面,該部位的指令就會被「爬行」覆蓋掉,傳遞給後面的都是「爬行」指令。
利用該成果有望查清動物適應環境靈活切換運動模式的機制。另外,還有助於實現無論在陸地上還是水中都能自由移動、環境適應能力比較高的機器人。
相關研究成果已於2019年12月2日發布在英國科學期刊《科學報告》(Scientific Reports)的網路版上。
發表論文
■論文名稱:Decoding the essential interplay between central and peripheral control in adaptive locomotion of amphibious centipedes
期刊:《Scientific Reports》
文:JST客觀日本編輯部翻譯整理