東京工科大學工學部的野田龍介講師等的研究團隊發布研究成果稱,全球首次明確了蜻蜓快速逃出起飛時的流體力學機制。此番蜻蜓固有的優異機動性飛行機制的闡明有望促進開發新一代撲翼式飛行機器人。相關成果已發表在《Journal of Fluid Mechanics》的線上版。
許多具有飛行能力的昆蟲由於振翅運動和體型特點而具備出色的飛行性能,所以作為新型小型飛行機器人的設計參考而備受關注。其中,蜻蜓作為地球上最成功的空中掠食者之一,自古以來就生存於地球並實現了不斷演化。與許多昆蟲的前翅和後翅成對進行振翅運動相比,蜻蜓的特點是可以獨立控制前翅和後翅飛行。
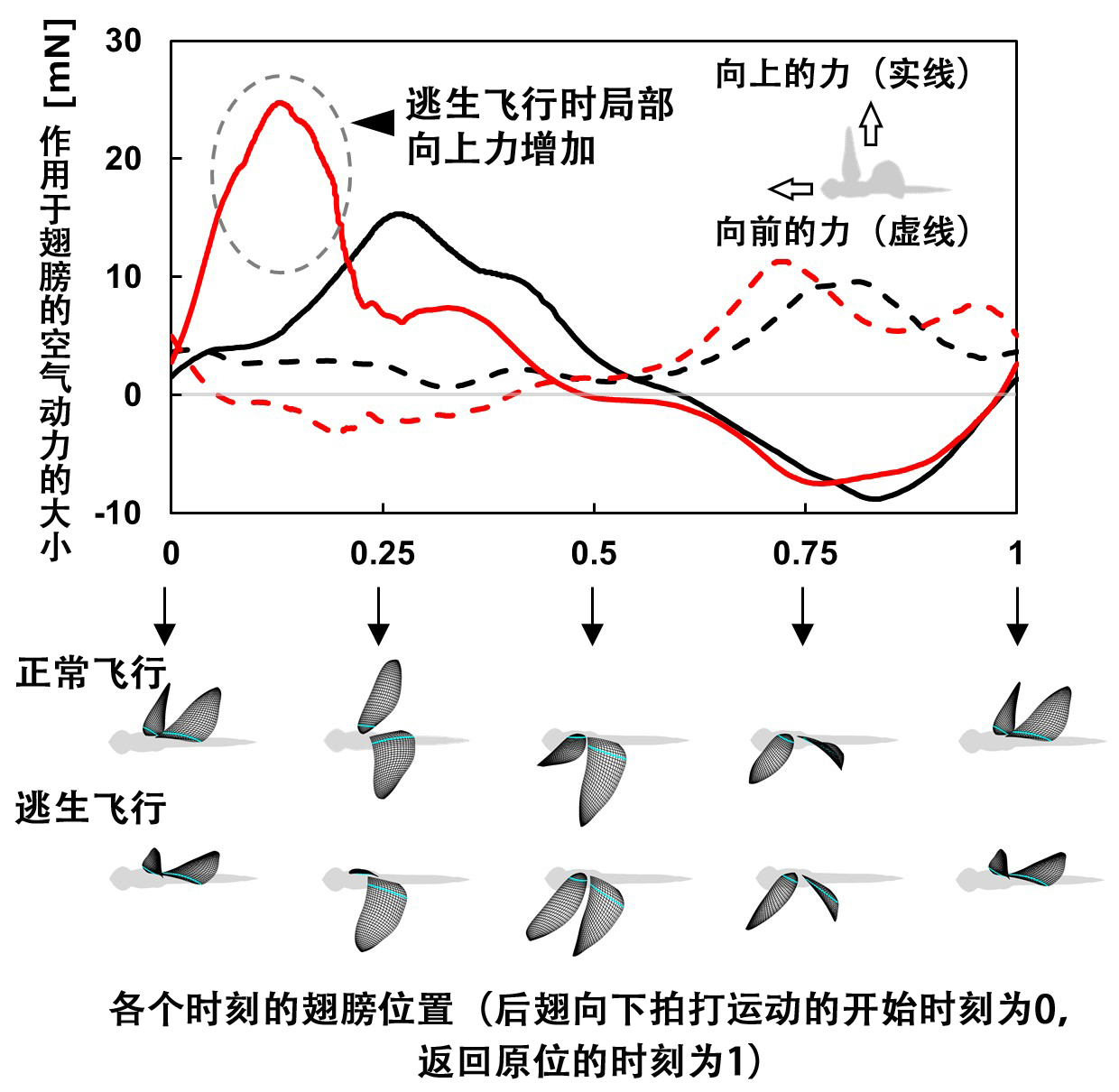
圖1 蜻蜓振翅運動時作用於翅膀的空氣動力。黑線表示正常飛行,紅線表示逃出飛行。逃出飛行時,向上的力會在局部出現大幅增加。(供圖:東京工科大學)
研究團隊利用蜻蜓正常飛行時的翅膀運動和世界上首次測量到的逃出飛行時翅膀的運動,通過數值模擬了對振翅運動產生的空氣動力,並分別進行了驗證。
數值模擬的結果在世界上首次明確了蜻蜓逃出飛行時後翅的迎角比正常飛行時更大,以降低飛行效率為代價使局部空氣動力增加的機制。
此外,研究團隊還揭示了這種空氣動力的增加是蜻蜓巧妙地改變了前翅和後翅的振翅時機(相),利用前翅扇動產生的氣流,促進在後翅表面產生穩定的渦流,從而對空氣動力的生成做出很大貢獻。
這一發現與以往的研究所展示的蜻蜓逃出飛行時前翅和後翅的振翅時機有所不同,揭示了蜻蜓通過新的流體力學機制增加用於逃出時局部空氣動力的可能性。
近年來,儘管旋翼式無人航空載具已在貨物運輸、農藥噴灑、基礎設施巡檢等領域得到廣泛的社會實際應用,但仍存在安全性及噪音等問題。模仿自古以來與人類共生的蜻蜓等生物飛行的撲翼式飛行機器人,有望促進上述問題的解決,本次的成果有可能成為其設計指南的重要因素。
原文:《科學新聞》
翻譯:JST客觀日本編輯部
【論文資訊】
雜誌:Journal of Fluid Mechanics
論文:The Interplay of Kinematics and Aerodynamics in Multiple Flight Modes of a Dragonfly
DOI:doi.org/10.1017/jfm.2023.471