以東京大學研究生院資訊理工學系研究科的竹内昌治教授和河井理雄(現為哈佛大學博士生)等為主要成員的研究團隊,利用人類皮膚細胞製成培養皮膚,並開發出了一款細胞來源活體皮膚的人臉型機器人。研究人員從人類皮膚支撐結構中獲得啟發,設計了一種活體生物組織與人造物體的黏合方法,並運用這種方法成功製作了皮膚平整黏合的人臉型機器人。此次開發的培養皮膚機器人的製作技術,不僅有望用於開發具有活體機能的類人機器人,該技術還有望應用於理解皺紋形成機制等美容整形醫療領域的課題。研究成果已於6月26日發表在期刊《Cell Reports Physical Science》上。
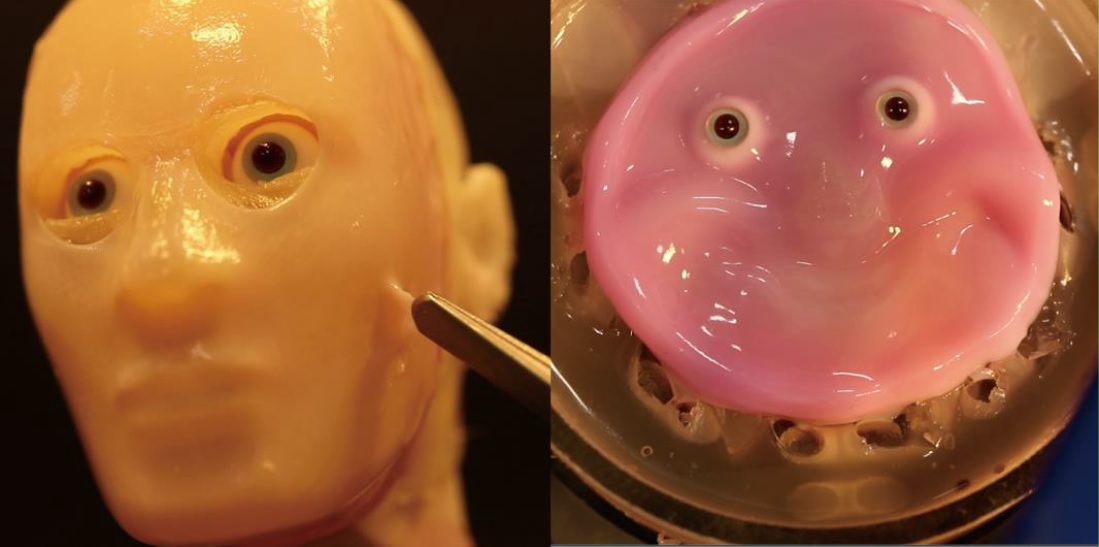
圖 由培養皮膚覆蓋的面部模型(左)和笑臉機器人(右)(供圖:東京大學)
此前的類人機器人一直是通過覆蓋矽膠來使其具備像人一樣柔軟皮膚的。但使用矽膠,機器人就無法具備像人類一樣的自愈、感知、熱放射(出汗)等能力。
為攻克這些課題,研究團隊此前曾利用人類細胞製成的培養皮膚作為機器人皮膚,開發了覆蓋著活體皮膚組織的手指型機器人等。然而,要將皮膚組織用作機器人外覆材料,還必須找到一種能夠將皮膚組織平整固定在機器人上的方法。正如人類的皮膚與皮下組織之間無法滑動的狀態那樣,皮膚和皮下組織以面的方式平整地黏合在一起。
在既往研究中,將固定活體組織附著到人造物體上時長期採用的結構是,利用突起的定錨結構鉤住組織的端點,但形狀突出的突起定錨結構可能會降低機器人的外觀平整度,甚至可能干擾機器人的運動。
在人體的皮下組織中,存在著一種被稱為「皮膚支持韌帶」的以膠原蛋白為主要成分的網狀纖維結構,起到將皮膚組織固定到皮下組織上的重要作用。這種組織還有助於將肌肉運動傳遞到皮膚,特別是在面部,便於通過情緒表達肌形成流暢的臉部表情。
在此次研究中,研究人員受到這種皮膚支持韌帶的啟發,開發出了一種將皮膚組織凝膠化並固定在V字貫通人造物體的孔内的「孔型定錨結構」,並利用這種結構製作了臉部被活體培育皮膚覆蓋的構造體。此外,為了示範動力通過定錨系統傳遞至皮膚組織的情況,研究人員還開發了一款通過孔型定錨結構將馬達的動力傳遞至皮膚從而能夠微笑的臉型機器人。
原文:《科學新聞》
翻譯:JST客觀日本編輯部
【論文資訊】
期刊:Cell Reports Physical Science
論文:Perforation-type anchors inspired by skin ligament for the robotic face covered with living skin
DOI:10.1016/j.xcrp.2024.102066