在自動駕駛領域,用於檢測人和障礙物的「LiDAR(激光達)感測器」的開發正在不斷取得進展。LiDAR是一種根據發射雷射的反射光,三維測量目標物體的距離和形狀的技術。儘管其作為代替艙面部門甲級船員視覺的技術被寄予厚望,但通過雷射攻擊,可被注入虛假數據,存在偽造不存在物體的風險。
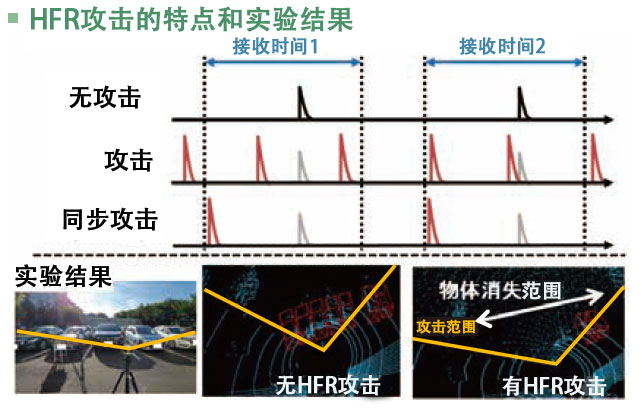
在起伏同步攻命中,攻擊雷射按照LiDAR的測距雷射接收時間發射,或者在HFR攻命中,通過大量發射雷射脈衝來妨礙LiDAR的測量(上)。HFR攻擊具有應用範圍廣的特點(下)。
慶應義塾大學理工學部的吉岡健太郎專任講師等對新舊9種LiDAR感測器以及3種物體偵檢器進行了大規模脆弱性調查,評估了各種感測器針抵禦攻擊的性能。結果顯示,老一代感測器無法避免通過「起伏同步攻擊」(即攻擊雷射的發射週期與測距雷射一致)注入偽裝物體,而新一代感測器能夠通過隨機械液壓調速器整測距雷射的發射時機使這種攻擊無效。
此外,研究還發現了一種在新一代LiDAR中同樣有效的攻擊技術,並將其命名為「高頻雷射去除攻擊(HFR)」。這是一種通過以高於測距雷射的發射頻率大量發射高頻攻擊雷射脈衝,干擾LiDAR的測量從而消除物體的方法。在HFR攻擊實驗中,即使是在陽光強烈、攻擊難度高的盛夏戶外環境中,也成功消除了水平範圍超過80度的物體。
上述成果指出了LiDAR感測器的脆弱性,顯示有必要開發防禦措施。預計未來將開發提高感測器抵禦惡意攻擊的技術,以及防止注入偽裝數據的新演算法。此外,本研究成果在公開前已遵循計算機安全研討會制定的倫理考量清單,提前向各LiDAR製造商通報了漏洞,並在經過採取一定應對措施後才予以公開。(TEXT:JST公關部 中島 彩乃)
原文:JSTnews 2024年5月號
翻譯:JST客觀日本編輯部