
日本資訊通信研究機構最近成功完成了一項實驗,可避免同時飛行的多架無人航空載具過度接近。為了使包括無人航空載具在内的多個飛行體在同時飛行時實現安全航行,通過無人航空載具之間的直接通信,利用共享位置資訊的系統「無人航空載具測繪儀」對飛行進行控制,最多能控制3架無人航空載具自動避免與靠近的其他無人航空載具過度接近。
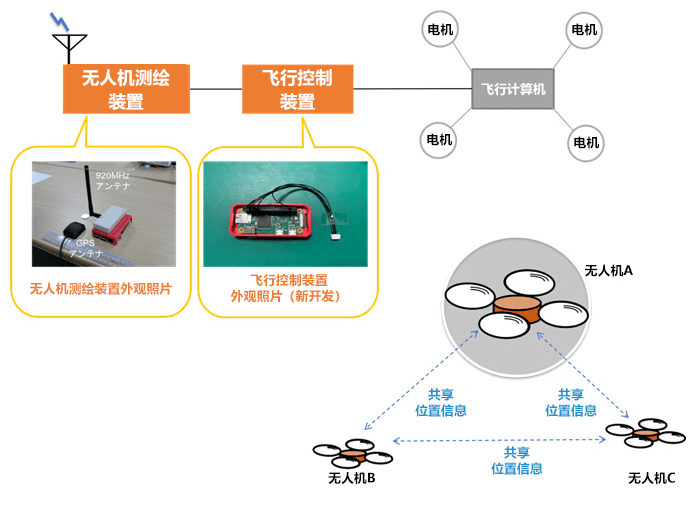
圖1:連接無人航空載具測繪儀和飛行控制裝置的無人航空載具結構圖
無人航空載具在視線範圍外飛行時,以前採用的飛行控制方法是,讓操縱者與無人航空載具之間保持通信的同時,使無人航空載具按照提前設定的飛行路線和飛行方法自動飛行。但這種飛行控制模式存在問題,比如難以應對其他無人航空載具和載人飛機等的接近情況。
為了讓無人航空載具測繪裝置與無人航空載具飛行計算機聯動,此次專門開發了飛行控制裝置。該飛行控制裝置根據無人航空載具測繪儀共享的周邊無人航空載具的位置資訊來檢測接近情況,然後根據周邊接近的無人航空載具的飛行方向等,向無人航空載具輸出指令,控制該無人航空載具的飛行速度和飛行方向。在該系統中,無人航空載具之間根據相互直接共享的位置資訊來控制飛行,因此無需操縱者操作,無人航空載具就可以自動避免與其他無人航空載具接近,還能自動追隨其他無人航空載具飛行(圖1)。
為了評估新開發系統的性能,資訊通信研究機構為不同操縱者操作的多架無人航空載具配備了無人航空載具測繪儀和飛行控制裝置,並於2018年12月17日及18日在日本埼玉縣秩父市的某廣場實施了驗證實驗。本試驗首次在實際的飛行環境中確認,通過無人航空載具之間的直接通信,可以根據彼此的位置資訊檢測接近情況,當彼此之間的距離在40m左右時,就會自動採取行動避免過度接近,在保持安全距離的情況下到達目的地。圖2是3架無人航空載具各自單獨飛行時自動避免過度接近的照片,圖3是1架單獨飛行的無人航空載具與3架編隊飛行的無人航空載具(3架無人航空載具利用以往的技術,通過經由地面站的飛行控制進行編隊飛行)自動避免過度接近時的照片。圖4是兩架單獨飛行的無人航空載具自動避免過度接近時的飛行軌跡(基於無人航空載具測繪儀取得的位置資訊的軌跡)。
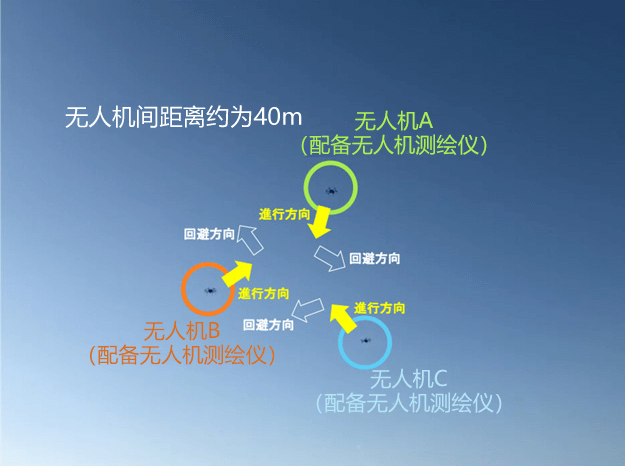
圖2:飛行控制試驗(3架無人航空載具單獨飛行時自動避免過度接近的情形)
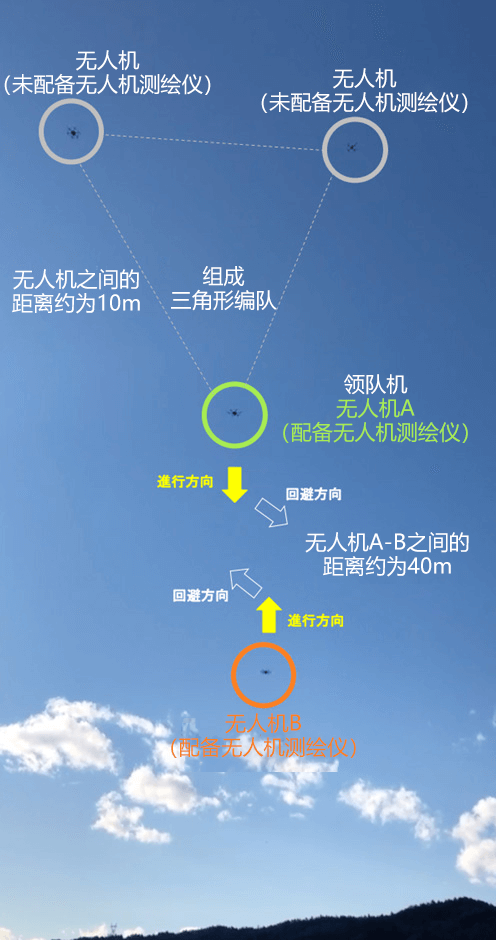
圖3:3架編隊飛行的無人航空載具(僅領隊機配備無人航空載具測繪儀和飛行控制裝置)與對面1架無人航空載具相互避免碰撞的情形
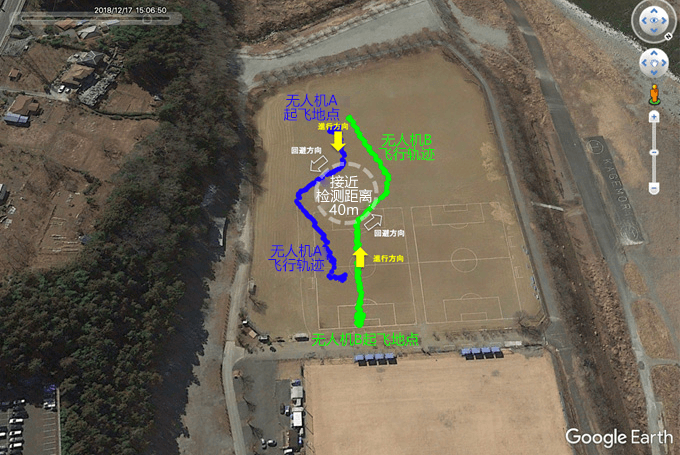
圖4:1對1迴避飛行的軌跡(利用無人航空載具測繪儀取得的位置資訊)
文 JST客觀日本編輯部
日文發布全文 [網路位址]











