
老化的橋樑和大型建築物的檢查已成為日本當前的一個重要課題,尤其是在難以進行人工作業的場所,亟需利用機器人手臂來解決這個課題。
因此,日本新能源產業技術綜合開發機構(NEDO)與東京工業大學聯合推進能進入狹窄空間内的細長型機器人的研發,最終於2018年9月開發出了全球最長的超長多關節機器人手臂,機械臂長10m,直徑為20cm,重300kg,可動範圍的最大高度為10m、水平方向為8m。
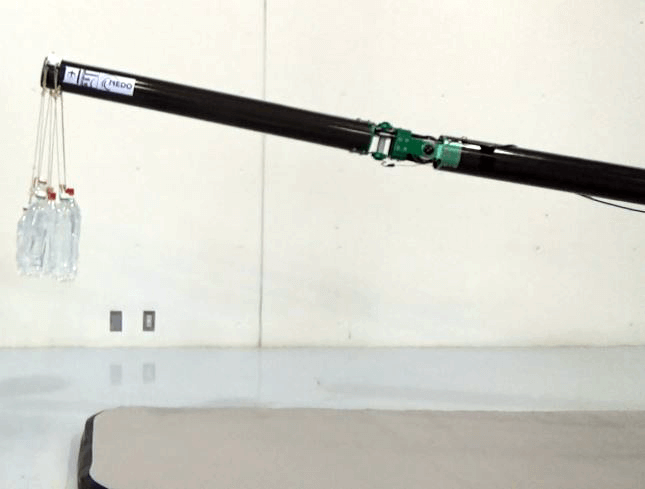
圖1:經驗證,機械臂頂端能保持水平承受10kg的重物
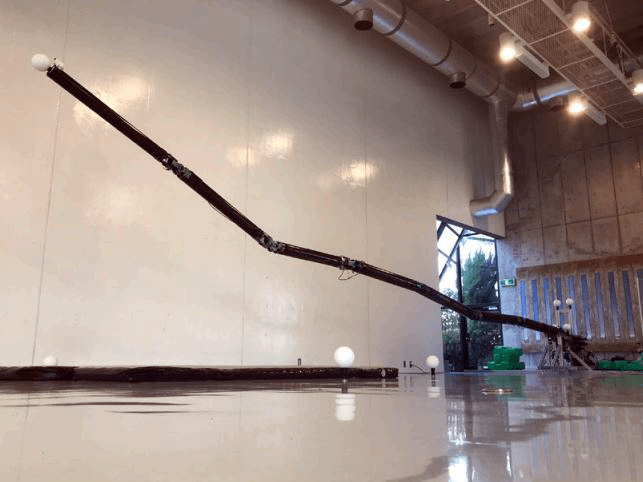
圖2:整個機械臂長10m,直徑為20cm,重量為300kg(機械臂部分重50kg,基礎部分重250kg)
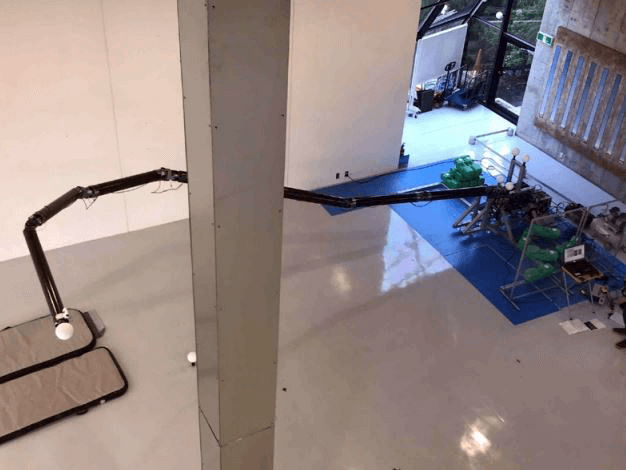
圖3: 超長多關節機器人手臂向側面空間彎曲
此次驗證,這款機器人手臂的頂端可以在水平方向承受10kg的重量。基於槓桿原理,較長的機器人手臂不容易在保持水平的狀態承重。因此,研發小組通過在關節滑輪上纏繞多根合成纖維索來分散和支撐負載,實現了此次的機器人手臂。今後,不僅是保持水平承重,還將開發能提起和搬運重物的技術。
這款機器人手臂採用細長形狀,而且擁有多個關節,因此能躲避障礙物,可以進入狹窄的場所進行探測。此次驗證機械臂水平時可承重10kg,因此有望利用該機械臂,使橋樑和隧道等大型建築物的基礎設施檢查作業中的目視檢查及鎚擊檢查實現自動化等。
另外,設定機械臂長10m、直徑20cm、承重10kg的參數是為了讓機器人手臂抵達核電站反應堆圍阻的中心部位,搬運各種調查設備,通過聽取實際參與廢堆作業的企業的意見,東京工業大學設定了這些目標值。
【1】基於纖維繩的多關節驅動機構
基於纖維繩的關節驅動機構能將較重的驅動部集中配置在基礎部分,因此優點是可以減輕機械臂本身的重量。各關節安裝了自由轉動的滑輪,繩索纏繞在滑輪上。繩索頂端固定到機械臂頂端,拉動根部,頂端的關節會產生力(扭矩),經過的所有關節都會產生相同大小的扭矩(圖4)。
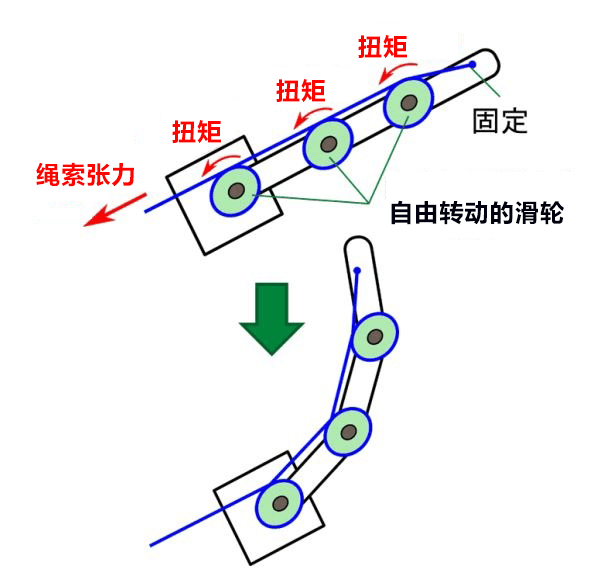
圖4:纖維繩的干擾驅動原理
利用該特性,驅動頂端關節的扭矩也能用來驅動根部關節,因此根部可以產生非常大的扭矩。針對這種機構(圖5(a)),此次新開發了在中心部分穿過一根粗繩索,利用粗繩索支撐機械臂自身的大部分重量,然後用細繩索單獨控制各個關節的細微動作的方法(圖5(b))。
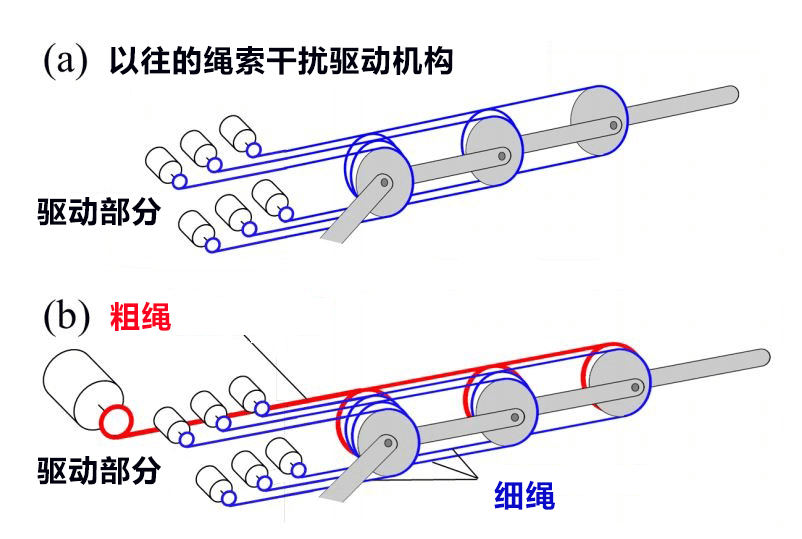
圖5:以往的干擾驅動機構(a)、新開發的機器人機構(b)
利用該機構,通過用多根合成纖維索分散和支撐負載,與以往相比,機械臂頂端能夠承受更大的重量,此次實現了10kg的水平承重(圖6)。粗繩索的直徑為5.5mm,通過驅動部產生了最大3000kg重的張力。
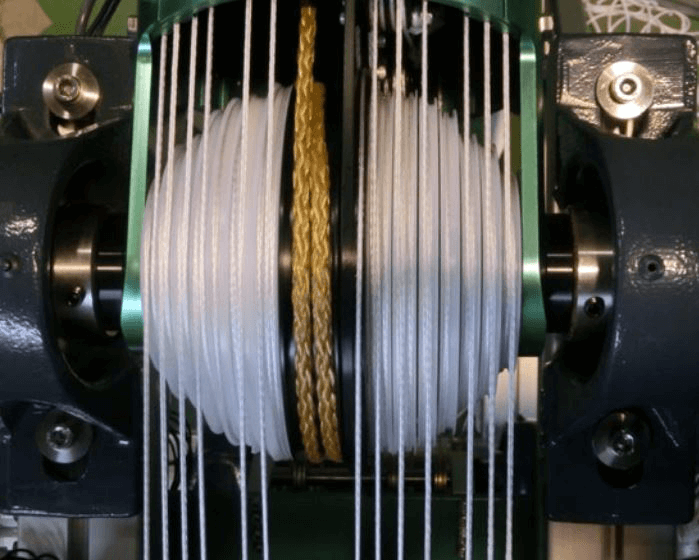
圖6:實際的根部關節的結構
文 JST客觀日本編輯部











