
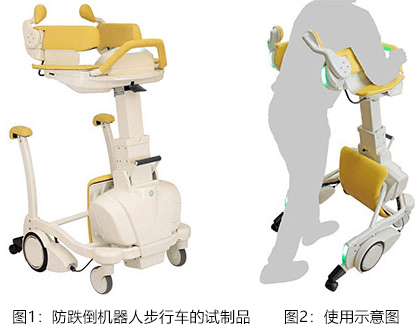
日本幸和製作所與日本產業技術綜合研究所(簡稱產綜研)合作,開發出了具備防跌倒功能的機器人步行車。
以往的步行車都未配備防止客戶跌倒的功能,存在從步行車上跌落和步行車整個側翻的風險。新開發的步行車通過模擬跌倒動作進行設計,配備了通過抑制跌倒的初始動作來防止跌倒的機構。防跌倒機構的有效性已通過假人模型測試進行了驗證。
在護理設施等場所,存在跌倒風險的被護理者移動時大多使用輪椅,導致需要高度護理的「被動癱瘓在牀」患者的數量增加。利用此次開發的步行車,存在跌倒風險的被護理者也可以安全行走,有望實現防止護理等級升高的自立支援護理、抑制護理費用的增加。預計2021年2月前投入實用。
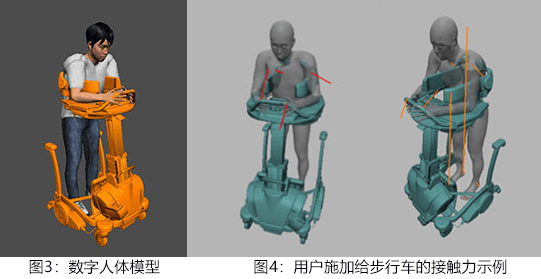
研究團隊利用數字人假體型,改變使用者在步行車前的相對站立位置和姿勢,並解析了使用者施加給步行車的觸點壓力和力矩,評價了在最不穩定的狀態下,步行車的車輪是否會離開地面,以此為基礎設計了步行車的重量。圖3為模型,圖4左側是給步行車施加非對稱力,右側是步行車和地面回饋給使用者的力的示例。數字模擬工作由產綜研負責。
操作性方面,將左右驅動輪配置在使用者腳部附近,使兩個輪子以腳的位置為中心逆向旋轉便可以轉彎,這是通過對兩個輪子進行動力輔助實現的。動力輔助是通過檢測車輪速度進行扭矩控制實現的,通過檢測地面傾斜來控制左右輪的平衡。
跌倒與使用者的重心在地面的投影點從支撐基底面的中心向邊界偏移有關,此次開發著眼於這一點,開發了抑制這種重心偏移的初始移動的機構。該機構靠近但不接觸腋下,在環繞上半身的同時,為防止客戶向後跌倒,還對後背提供支撐,是對6種跌倒模式都有效的防跌倒機構。驅動輪的設計和動力輔助以及防跌倒機構均由幸和製作所開發。
此次開發中製作的假人,身體各部位的尺寸、重量分配及關節可動區域都是根據老年人的測量統計資訊設計的,全身擁有33個以上的自由度。除了可以改變膝蓋等關節的硬度實現獨自站立的姿勢外,還著眼於使用步行車時跌倒的情況,為了再現從步行車中間滑下去跌倒的動作,沒有在腋下設置機械卡鎖。
利用假人的跌倒實驗如圖5所示。圖6是以重心後仰姿勢實施跌倒實驗時,重心在地板上的投影點軌跡。可以看出,左側是採用第1次的試製品時,隨著假人向後傾倒,步行車也向後移動,假人的重心投影點停留在支撐基底面内,而在右側利用普通步行車實施的實驗中,隨著假人向後傾倒,步行車被腳推向前方,假人的重心投影點移動到支撐基底面外,從而造成假人跌倒。

圖5:利用假人實施的跌倒實驗
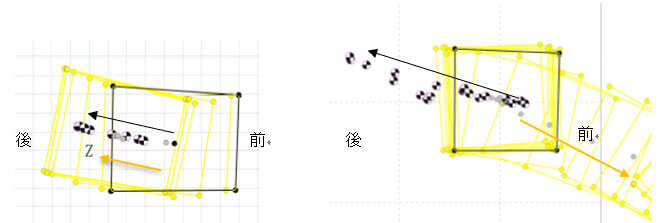
圖6:重心移動軌跡(黑氫脆化是重心投影點,黑框是支撐基底面的初始位置,黃色為其軌跡)(左)此次開發的步行車,(右)普通的步行車
文:JST客觀日本編輯部翻譯整理











