
上接:用智慧機器人連接AI與社會,陪伴人類並提供家務、醫療和養老援助(上)
發展「深度預測學習」
最大限度減少與現實的誤差
菅野先生等為建立協助家務的機器人的智慧化,開發了「深度預測學習」。傳統的機器學習利用大量數據構建最佳預測模型,使機器人能夠執行各種任務。然而,在現實中,機器人經常會遇到一些意想不到的情況,很難構建一個能夠應對所有狀況的預測模型。「另一方面,深度預測學習會根據視覺和觸覺資訊進行預測,為最大限度減少與現實的誤差做出下一個動作的指示。如此一來,機器人便可以靈活應對任務内容和週遭環境的變化」,菅野先生說明道。

圖4 與人類共存型乾式機器人「Dry-AIREC」
為進行學習和獲取人類技能而開發的「Dry-AIREC」乾式機器人是向東京機器人公司(Tokyo Robotics,東京都文京區)定製的。各關節均内置高解析度扭矩感測器,表面採用接近人體皮膚的凝膠材料製成(左)。機器人的動作柔和,人在外部動作也能夠完美跟隨,是世界上最高水平的人類共存型乾式機器人(右)。
目前,基於項目開發的人類共存型乾式機器人「Dry-AIREC」,研究人員正在致力於實現協助人類的手工作業,特別是家務的機器人智慧化(圖4)。通過協調機械手的雙臂,已經實現了晾曬和摺疊衣物等家務任務(圖5)。然而,要區分絲綢布料和綿羊毛等觸感不同的衣物還十分困難。此外,僅家務活動中就存在大量困難的課題,如掌握使用多種食材的烹飪技能、垃圾處理和擦拭地板等需要適應環境的清潔方法,要實現無所不能的機器人絕非易事。
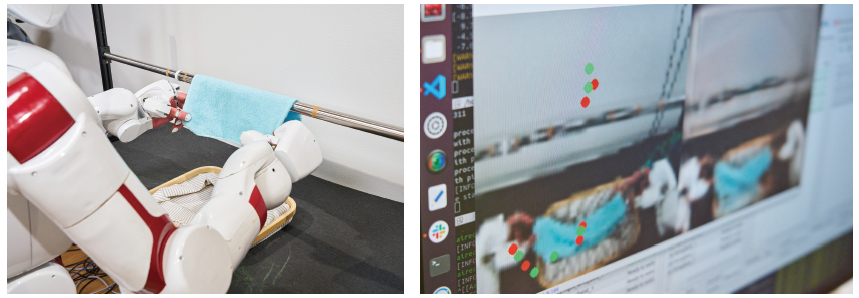
圖5 「Dry-AIREC」學習洗滌輔助動作
研究團隊與德國慕尼黑工業大學合作,使用了深度預測學習和注意機構的雙臂,協調進行了衣物晾曬實驗。結果表明,可以識別以不同晾曬方式和位置的衣物,並執行機器臂的彎曲和伸直、抓取和提起衣物等動作。
在醫療和護理領域使用智慧機器人協助人執行任務時,為絕對避免對人造成傷害,必須確保安全、柔和地工作。因此,目前研究團隊正在開發可以在人的旁邊提供幫助的「生物混合型機器人皮膚」,以及能夠進行觸診和簡單處理等醫療檢查專用的機械手。除了上述技術之外,為構建可以執行對人進行物理可用能性身體接觸任務的機器人系統,還在推進各種動作實驗(圖6)。
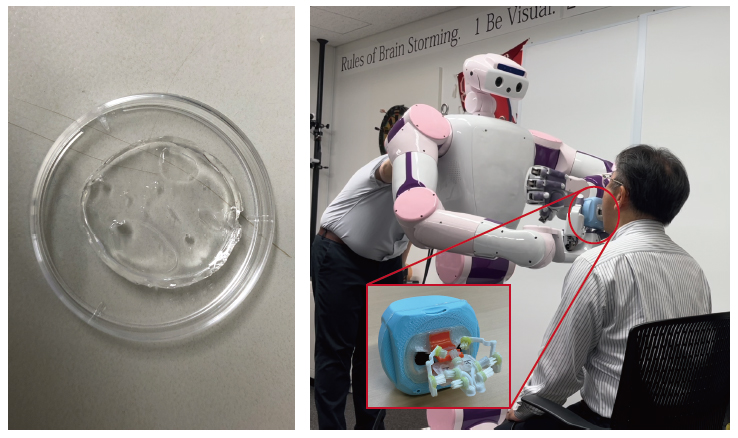
圖6 在人身邊提供幫助的機器人手部皮膚的開發
為了實現可以替代人手的機器人手部皮膚,以在醫療、護理現場的實際使用為目標,具有彈性、粘合力、高伸展性和自我修復性的凝膠材料(左)、預想用於口腔護理場景並展開實際操作的測試(右)等相關實證實驗正在推進之中。
「身體智慧的實現」是重要課題
軟體和硬體的整合至關重要
除上述項目外,登月型研發事業在AI、中間軟體和硬體領域也開展了多個研發項目。菅野先生指出,為了實現理想的智慧機器人,還有許多課題需要解決。這是因為,與其他領域的研究不同,機器人不會因為一次創新就飛躍式地進入下一個階段。
菅野先生表示,「身體智慧的實現」是關鍵課題之一。身體智慧是指無意識地利用自身身體特徵進行動作的能力,例如騎腳踏車等,其一直被認為是傳統AI難以應對的目標。「我認為AI必須從軟體轉變為‘軟體+硬體’。為了實現AI的創新並獲得新技能,硬體也必須不斷發展」。此外,要實現智慧機器人,僅僅開發新技術是不夠的,還必須進行「整合」,即將其最適化組合。
「即使通過整合形成了組合,隨後又會出現下一個課題,為改進這一課題再進行下一次整合。智慧機器人的開發就是這一過程的不斷重複」。在菅野先生的強烈意志下,不僅是參與該項目的研究人員,同時也匯集了許多學生。在逐一解決阻礙前進步伐的課題的同時,研究團隊正在穩步地為智慧機器人的社會實際應用開闢道路。(全文完)(TEXT:佐宗秀海、PHOTO:伊藤彰浩)
原文:JSTnews 2024年3月號
翻譯:JST客觀日本編輯部











